|
Alberto José Álvares1
| SIGLA | INGLÊS | PORTUGUÊS |
| AI | Artificial Intelligence | Inteligência Artificial |
| API | Application Programming Interface | Interface de Programação de Aplicação |
| BD | DataBase | Base de Dados ou Banco de dados |
| B-Rep | Boundary Representation | Representação de Fronteira |
| CAD | Computer Aided Design | Projeto Assistido por Computador |
| CAM | Computer Aided Manufacturing | Manufatura Assistida por Computador |
| CAPP | Computer Aided Process Planning | Planejamento de Processo Assistido por Computador |
| CGI | Comun Gateway Interface | Interface de Porta Comum |
| CNC | Computer Numerical Control | Comando Numérico Computadorizado |
| CSCW | Computer Support Cooperative Work | Trabalho Cplaborativo Suportado por Computador |
| CSG/DSG | Constructive/Destructive Solid Geometric | Geometria Sólida Construtiva/Destrutiva |
| GUI | Graphical User Interface | Interface gráfica para usuário |
| DBMS | Database Management System | Sistema de Gerenciamento de Banco de Dados |
| DXF | Data Exchange Format | Formato de Troca de Dados |
| FTP | File Transfer Protocol | Protocolo de Transferência de Arquivo |
| GT | Group Tecnology | Tecnologia de Grupo |
| HTML | Hiper Text Markup Language | Linguagem de Hipertextos |
| HTPP | Hypertext Transfer Protocol | Protocolo de Transferência de Hipertexto |
| IGES | Initial Graphics Exchange Specification | Especificação de Intercâmbio de Gráficos Inicial |
| IP | Internet Protocol | Protocolo Internet |
| JDBC | Java Database Connectivity | Conectividade deBanco de Dados |
| JDK | Java Development Kit | Kit de Desenvolvimento Java |
| JVM | Java Virtual Machine | Máquina Virtual Java |
| KBE | Knowledge Based Engineering | Engenharia Baseada no Conhecimento |
| MIME | Multipurpose Internet Mail Extensions | Extensões Multipropósito para Correio na Internet |
| NC | Numerical Control | Comando Numérico |
| NTSC | National Television Standards Committee | Comitê Nacional de Padrões de Televisão |
| ODBC | Open Database Connectivity | Conectividade de Banco de Dados Abertos |
| OODB | Object Oriented Database | Banco de Dados Orientado a Objetos |
| PC | Personal Computer | Computador Pessoal |
| PDES | Product Data Exchange using STEP | Intercâmbio de Dados de Produto usando STEP |
| PDM | Product Data Management | Gerenciamento de Dados de Produto |
| RDBMS | Relational Database Management System | Sistema de Gerenciamento de Banco de Dados Relacional |
| SQL | Structured Query Language | Linguagem de Pergunta Estruturada |
| STEP | Standard Exchange of Product Model Data | Padrão de Intercâmbio de Dados do Modelo do Produto |
| TCP | Transmission Control Protocol | Protocolo de Transmissão Controle |
| UML | User Datagram Protocol | Protocolo de Datagramas de uUsuário |
| URM | Unified Modeling Language | Linguagem de Modelagem Unificada |
| URL | Uniform Resource Locators | Localizador de Recursos Uniforme |
| VRML | Virtual Reality Modeling Language | Linguagem de Modelagem de Realidade Virtual |
| WWW | World Wide Web | Rede Mundial de Computadores |
Esta disciplina de Estudo Dirigido, ``TeleManufatura Aplicada à Operações de Usinagem'', tem por objetivo dar subsídios ao desenvolvimento da tese de doutorado do aluno Alberto José Álvares nos aspectos referentes à manufatura remota baseada na Internet/Web. O tema de tese está associado ao desenvolvimento de ``Uma Metodologia para Integração CAD/CAPP/CAM Voltada para Manufatura Remota de Peças Rotacionais Simétricas Baseada na Internet (Web)", bem como a sua implementação computacional.
Esta é a segunda disciplina cursada como estudo dirigido a fim de completar os créditos refe-rentes ao seu doutoramento. Esta disciplina aborda os aspectos computacionais relacionados às linguagens de programação voltadas à Internet, basetypeset@protect @@footnote SF@gobble@opt Base de Dados pode também ser designado por Banco de Dados. Neste trabalho utiliza-se a terminologia Base de Dados. de dados relacional, shells de sistemas especialistas, sistemas multi-agentes, arquitetura cliente/servidor, sistemas distribuídos, lógica fuzzy, Unix, modelagem sólida utilizando Java e ACIS®, entre outras. Com estas duas disciplinas cursadas no formato de estudo dirigido, acreditá-se que grande parte dos aspectos referentes à revisão bibliográfica necessários ao exame de qualificação estarão cobertos. A data prevista para realização do exame de qualificação é Dezembro de 2002.
A ementa e o programa associados à disciplina são apresentados a seguir.
EMENTA: Internet e World Wide Web (WWW). Arquitetura Cliente/Servidor. Protocolos TCP/IP e HTTP. Aplicações em Java para a WWW. Java Server Pages (JSP), Servlets e Common Gateway Interface (CGI). Base de dados relacional (MySQL) e seu uso em aplicações WWW. Uso da WWW para projeto e manufatura. Exemplos e Análise de Aplicações em Telemanufatura: metodologias e arquiteturas desenvolvidas. Hardware para Telemanufatura: redes de computadores, máquina CNC com arquitetura aberta e proprietária, teleoperação e captura de imagem e vídeo (câmera web) Largura de banda de redes de computadores para telemanufatura. Metodologias de telemanufatura para operações de torneamento. Formato VRML para visualização remota de peças. Segurança em operações de telemanufatura. Sistemas Multi-Agentes (MAS) no Planejamento do Processo, e seu uso num ambiente WWW. Sistemas Especialistas em ambiente WWW. Metodologias e Sistemas CAD/CAPP/CAM Via Internet.
PROGRAMA:
Para realização deste estudo dirigido foi consultado uma grande quantidade de material bibliográfico disponível em diversas mídias (journals on-line/Internet, journals impressos, livros, teses e dissertações on-line e impressas, sites da Internet, etc). O material consultado através de arquivos (pdf, html, txt, doc, etc) está disponível em: ftp://omega.enm.unb.br/pub/doutorado. Este servidor armazena cerca de cinco gygabytes de informações de interesse para o doutorado, tanto para esta disciplina quanto para a primeira disciplina de estudo dirigido.
A seguir é apresentada a bibliografia básica definida no programa da disciplina:
Após discussão com o Prof. João Carlos Espíndola Ferreira sobre o conteúdo a ser apresentado neste documento, definiu-se que deveria ter como escopo os aspectos referentes à Telemanufatura, que é um assunto básico na pesquisa de Doutorado. Este trabalho apresenta um levantamento dos trabalhos sendo feitos nesta área, tanto na área de software como de hardware, visando aplicação destas tecnologias no trabalho.
A fim de se ter um estrutura lógica, este relatório é dividido em nove capítulos que cobrem todos os aspectos que compõem o programa da disciplina.
O capítulo dois apresenta uma introdução à Manufatura Remota e à Manufatura Virtual baseada na Internet/Web descrevendo seus conceitos, arquiteturas e suas funções básicas.
O capítulo três apresenta uma revisão sobre a tecnologia Internet, em especial as ferramentas de desenvolvimento voltadas para web.
O capítulo quatro discute a Manufatura Remota apresentando vários sistemas de teleoperação desenvolvidas pelo doutorando na Universidade de Brasília.
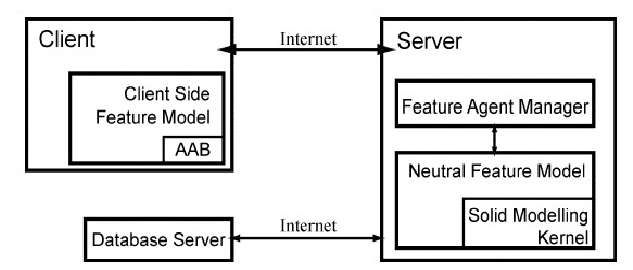
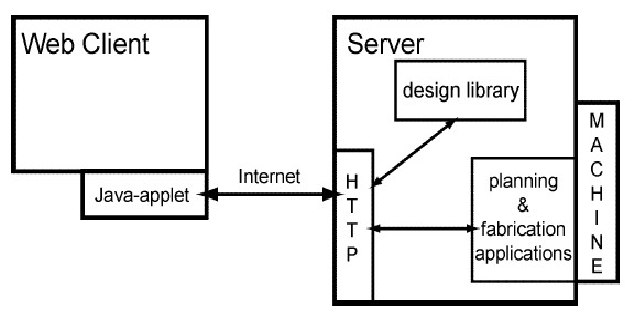
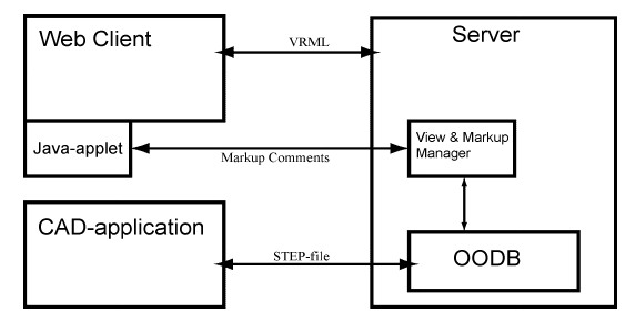
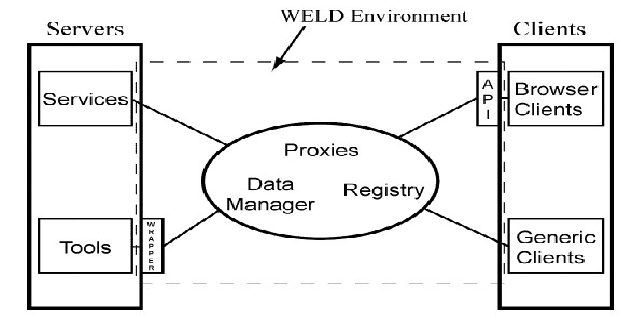
O capítulo cinco aborda metodologias e sistemas CAD/CAPP/CAM baseados na Web onde normalmente se utiliza da tecnologia de Projeto por features, sendo as features de projeto e manufatura os elemento de integração entre o projeto e a manufatura.
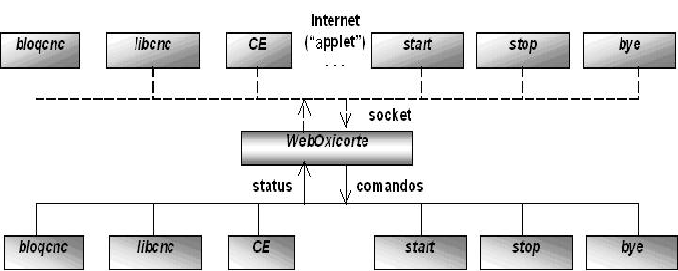
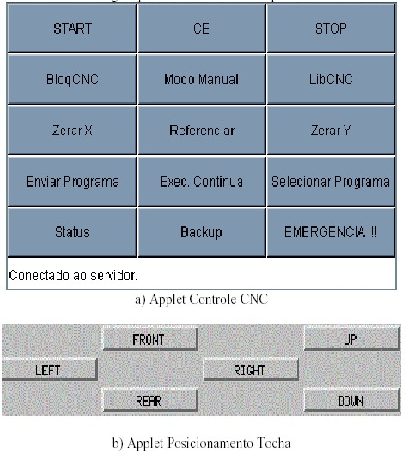
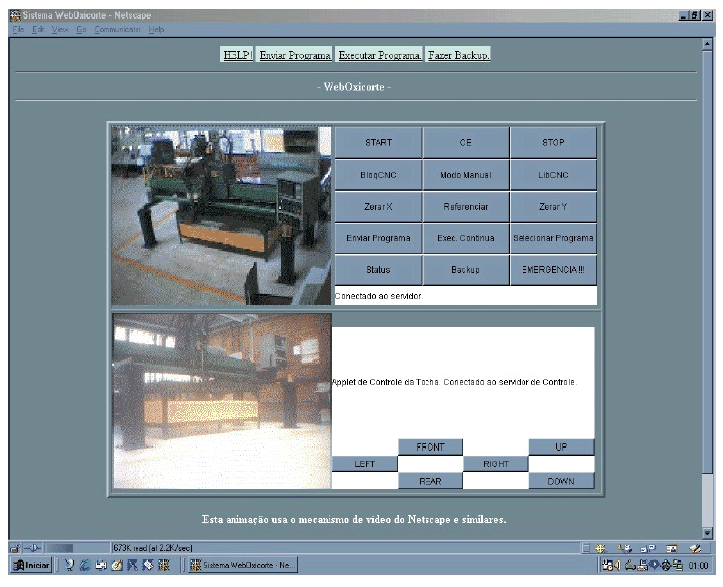
O capítulo seis apresenta um sistema de Telemanufatura desenvolvido pelo doutorando voltado para o processo de Oxi-corte. Este sistema, denominado de WebOxiCorte, demonstra a filosofia de integração CAD/CAPP/CAM tanto no nível de planejamento e desenvolvimento de produto (geração do código G) quanto no nível de chão-de-fábrica (teleoperação da máquina de comando numérico) a partir da Web.
O capítulo sete apresenta algumas ferramentas computacionais utilizadas no CAPP, derivadas de técnicas de representação do conhecimento e abordagens clássicas.
O capítulo oito descreve algumas ações que foram desenvolvidas para implantação de infra-estrutura computacional para o desenvolvimento das atividades de CAD/CAPP/CAM nas ins-talações físicas do GRIMA (Grupo de Integração da Manufatura). O capítulo nove apresenta as conclusões do trabalho desenvolvido.
Este capítulo apresenta uma discussão sobre Manufatura Remota e Virtual, apresentando conceitos de Realidade Virtual e Teleoperação. O capítulo é baseado em vários projetos e trabalhos publicados pelo doutorando e em um projeto de pesquisa integrado que está sendo desenvolvido pela Rede de Automação da Manufatura (Manet), pertencente à Recope, denominado ``Desenvolvimento de um Sistema Inteligente de Produção com Gestão Remota Via Internet'' (MANET, 2002).
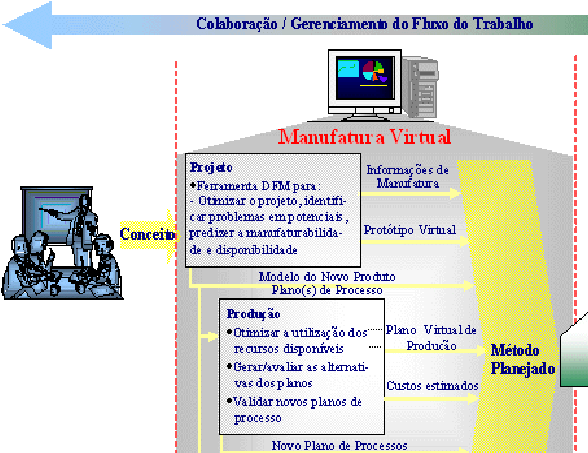
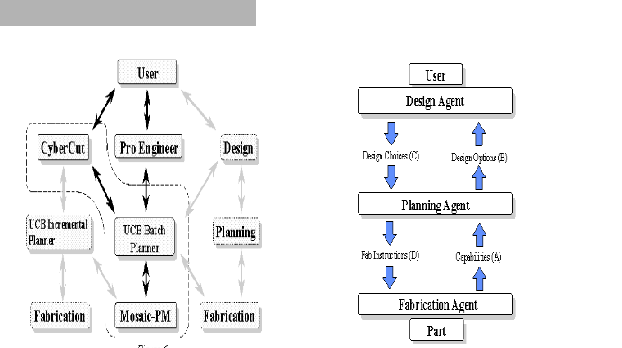
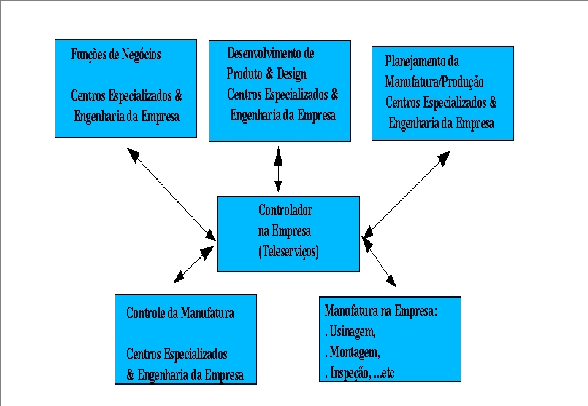
Segundo MALEK et al. (1998) TeleManufatura ou Manufatura Remota pode ser definida como uma atividade onde uma empresa (cliente) utiliza serviços oferecidos por Centros Especializados (servidores) disponibilizados via rede de comunicação através das supervias da informação (Internet) para executar, em tempo real, operações e processos necessários para o projeto e a produção de bens. Desta forma atividades relativas a TeleManufatura estão presentes em todo o ciclo de desenvolvimento do produto, desde a concepção do produto até a sua fabricação e distribuição (figura 2.1).
Atualmente já existem empresas com alto nível de especialização que oferecem serviços em um ambiente voltado para TeleManufatura. Estes centros especializados detêm o estado da arte na Tecnologia de Software (Sistemas CAE/CAD/CAPP/CAM/ERP entre outros), especialidades avançadas e acesso às informações atualizadas em seus campos a fim de auxiliar seus clientes no desenvolvimentos de novos produtos e processos (AHN et al. , 1999 e MALEK et al. , 1998). Sistemas como o CyberCut da Universidade de Berkeley (http://cybercut.berkeley.edu) possibilitam a concepção de uma peça prismática que será usinada utilizando-se de um sistema CAD/CAPP/CAM desenvolvido em Java (BROWN e WRIGHT, 1998). Outro exemplo foi desenvolvido por ÁLVARES et al. (2001) onde o sistema permite a teleoperação de uma máquina de Oxi-Corte CNC, bem como, a geração do programa NC da peça a ser produzida utilizando um ambiente de modelagem CAD/CAM desenvolvido na linguagem Java (http://weboxicorte.graco.unb.br), denominado de WebOxiCorte.
A empresa e-Manufacturing Networks (http://www.e-manufacturing.com) é uma da primeiras empresas focada em soluções a partir de TeleManufatura baseada em Web. A seguir é apresentado uma pequena descrição da empresa obtida de seu site: ``e-Manufacturing Networks permits manufacturers to web enable their factory floor and InterNetwork to Management Information Systems and trading partners. We are the first company to focus on using Ethernet connectivity to make every machine tool, of all makes, a node on the corporate network, and accessible through the Internet. e-Manufacturing Networks unlocks for manufacturers, real-time factory floor Information that is fundamental to gaining a competitive advantage.''
Assim sistemas de Teleoperação de equipamentos industriais enquadram-se no contexto de TeleManufatura (MALEK et al. , 1998) nos aspectos referentes ao controle da manufatura em operações de chão de fábrica (figura 2.1), bem como, ambientes computacionais integrados de CAD/CAPP/CAM para desenvolvimento de produto. Estes sistemas e ambientes de suporte ao desenvolvimento de produto e de teleoperação estão sendo atualmente disponibilizados através da Internet/Intranet sendo baseados nos protocolos de desenvolvimento para Web.
O ambiente de TeleManufatura é normalmente baseado em uma arquitetura Cliente/Servidor, que trabalha de forma interativa e cooperativa, solicitando e provendo serviços, bem como comparti-lhando recursos de forma distribuída (MONACO e GONZAGA, 1999; KAO e LIN, 1996; PRANDHAN e HUANG, 1998 e ADAMCYK e KOCIOLET, 2001). Sistemas de Teleoperação voltados para aplicações em Robôs Industriais e Robôs Móveis são descritos em ÁLVARES et al. (1998; 1999, 2000 e 2001). Em ÁLVARES et al. (1999) é apresentada uma metodologia para desenvolvimento de Sistemas Teleoperados via Internet.
É necessário fazer uma distinção do conceito de Manufatura Remota (TeleManufatura), que será utilizado no desenvolvimento do trabalho de doutorado, dos conceitos de Manufatura Virtual e Empresa Virtual que muitas vezes são confundidos.
De acordo com BANERJEE & ZETU (2001), o termo Manufatura Virtual passou a ser utilizado no início dos anos 90, em parte como resultado da iniciativa do Departamento de Defesa dos EUA, pois a evolução tecnológica propiciaria o desenvolvimento da capacidade de se confirmar a manufaturabilidade dos novos sistemas de armas antes de comprometer recursos na sua produção. Até metade dessa década, alguns trabalhos pioneiros nesse campo foram realizados por algumas organizações, principalmente a empresa aeroespacial e a indústria automobilística, além de ser abordado como tema em alguns grupos de pesquisa acadêmica.
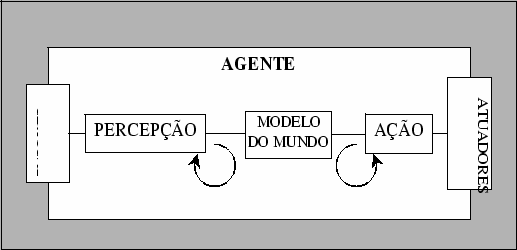
Manufatura Virtual pode ser usada em uma grande variedade de contextos de sistemas de manu-fatura, e pode ser definida como a modelagem destes sistemas e de componentes com o uso efetivo de computadores e de dispositivos audiovisuais e/ou sensoriais para simular ou projetar alternativas para um ambiente de manufatura, visando, principalmente, prever problemas potenciais e ineficiências na funcionalidade e manufaturabilidade do produto antes que a manufatura real ocorra, ou seja, ela visa definir um novo método de desenvolvimento do produto através da integração funcional das ferramentas computacionais disponíveis, figura 2.2.
A Manufatura Virtual pode também ser definida, conforme LAWRENCE ASSOCIATES INC (1994), como ambiente de manufatura sintético, integrado, que utiliza todos os níveis de decisão e controle no projeto de produto e processo, planejamento de processo, planejamento de produção e controle de chão de fábrica, onde:
Cerca de 70% do custo de um produto é representado pelo seu estágio de projeto. Sob o ponto de vista do ciclo de vida de um produto, o conceito de manufatura virtual proporciona aos profissionais relacionados ao projeto, processo e produção a capacidade de validação de seus projetos, planos de processos associados e planos operacionais em relação à viabilidade técnica e custos. A noção fundamental em Manufatura Virtual é a de um ambiente simulado de desenvolvimento de produto, o qual possibilita que o mesmo possa ser "fabricado virtualmente" antes de ser "fabricado de fato". Simulações realizadas no ciclo de vida das peças proporcionam dados precisos que impedem o desenvolvimento de um projeto que é difícil ou impossível de ser fabricado.
As áreas funcionais do ciclo de vida de produto na Manufatura Virtual incluem a interface homem-máquina (visualização), projeto de produto, desenvolvimento de processo, produção e controle de chão de fábrica.
Empresas Virtuais buscam o compartilhamento de especialistas, tecnologias, recursos e lucros para alcançar agilidade, ou seja, capacidade de prosperar em um meio em constante modificação, com um comportamento de difícil previsão (CAMARINHA-MATOS, 2000; VASILASH, 1993; HILTON & GILL, 1994). A troca de informações entre parceiros através de uma estrutura de rede de comunicação de dados é uma questão crítica para o sucesso de tais empresas. Os parceiros, em uma empresa virtual, devem compartilhar informações sobre produtos, processos e produção. Esta informação deve ser representada na forma de dados, conhecimentos e/ou modelos, podendo ser distribuída para diferentes ambientes computacionais.
Para a efetiva implantação de uma estrutura de Manufatura Virtual, os principais aspectos a serem considerados incluem:
O Trabalho Cooperativo, também denominado de ``Colaborativo''typeset@protect @@footnote SF@gobble@opt Neste Trabalho será utilizado o termo Cooperativo traduzido do Inglês Collaborative. O vocábulo ``Colaborativo'' não está presente em nossa língua. A fim de não criar um neologismo não será utilizado o termo ``Colaborativo''. , como item parte integrante da estratégia de implantação de uma estrutura de Manufatura Virtual envolve conceitos de Realidade Virtual, em ambientes compartilhados, proporcionando aplicações de Teleoperação, Telerobótica e Telepresença, além de uma infra-estrutura de Rede de Alta Velocidade. Estes temas são discutidos a seguir.
O termo Realidade Virtual (RV) pode ser interpretado como uma forma avançada de interface do usuário de computador (HANCOCK, 1995), a qual tem aplicação na maioria das áreas do conhe-cimento. Pode também ser definida como uma técnica avançada de interface, onde o usuário pode realizar imersão, navegação e interação em um ambiente sintético tridimensional gerado por computador, utilizando canais multi-sensoriais (JACOBSON, 1994; KRUEGER, 1991). A interface com realidade virtual envolve um controle tridimensional altamente interativo de processos computacionais, onde o usuário entra no espaço virtual das aplicações e visualiza, manipula e explora os dados da aplicação em tempo real, usando seus sentidos, particularmente os movimentos natu-rais tridimensionais do corpo. A grande vantagem desse tipo de interface é que o conhecimento intuitivo do usuário a respeito do mundo físico pode ser transferido para manipular o mundo virtual. Um sistema de realidade virtual envolve estudos e recursos ligados com percepção, hardware, software, interface do usuário, fatores humanos, e aplicações (BISHOP, 1992).
De maneira geral, pode-se considerar o conceito de realidade virtual como sendo composto por três conceitos chave, os quais coexistem: imersão, interação e envolvimento (MORIE, 1994).
A Realidade Virtual, por sua vez, também é uma tecnologia chave no desenvolvimento do produto e processo. A RV pode ser definida como "a habilidade em criar e interagir no espaço cibernético, isto é, um espaço que representa um ambiente com muita similaridade ao ambiente em torno de nós" (BANERJEE & ZETU, 2001).
De fato, realidade virtual e simulação são componentes em diferentes áreas, incluindo a Manufatura Virtual, mas há diferenças entre elas. Ambas, simulação e realidade virtual, são ferramentas que podem ser usadas para análise e teste de materiais, treinamento de pessoas de diversas maneiras, e o projeto e implementação de novas idéias e conceitos.
Uma distinção importante entre elas é como os usuários operam a tecnologia. A realidade virtual freqüentemente requer mais interação física da parte do usuário, enquanto a simulação tipicamente é mais passiva. A realidade virtual é um processo táctil, incorporando luvas, controle "joysticks", telas em capacetes, óculos estéreos 3D, e paredes e telas para projeção de vídeo. Simulação envolve software de visualização com gráficos de alta resolução, usando modelos CAD 3D, operando em estações gráficas de alto desempenho. Ambas podem ser usadas em conjunto por projetistas e engenheiros para criar praticamente qualquer tipo de mundo artificial imaginável. Nestes ambientes digitais, muitos tipos de situações do mundo real, variáveis, e reações podem ser duplicadas.
A Realidade Virtual tem sido usada por companhias tais como General Motors e Caterpillar para construir protótipos eletrônicos de veículos, ao invés de protótipos físicos, reduzindo significantemente o tempo de desenvolvimento do produto. PENG, HALL e LISTER (2000) apresentam um sistema CAPP Generativo baseado em Realidade Virtual (VR) voltado para o processo de usinagem.
A vantagem principal dessa tecnologia é o desenvolvimento e análise do projeto cooperativo, habilitando grupos de engenheiros a visualizar e manipular, em tempo real, um objeto virtual tão facilmente como eles poderiam fazer com um objeto físico.
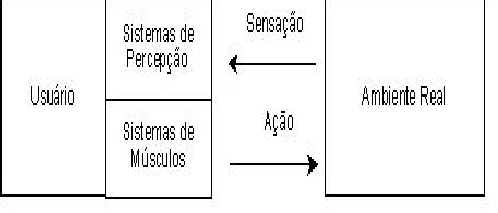
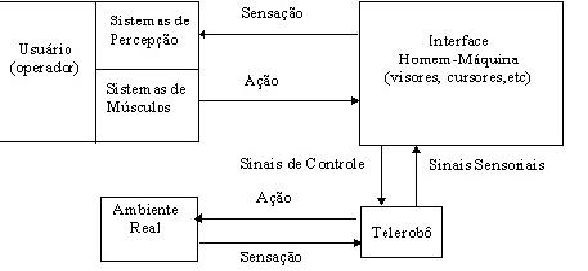
A figura 2.3 mostra o relacionamento usuário/ambiente em sistemas que utilizam interfaces não convencionais.
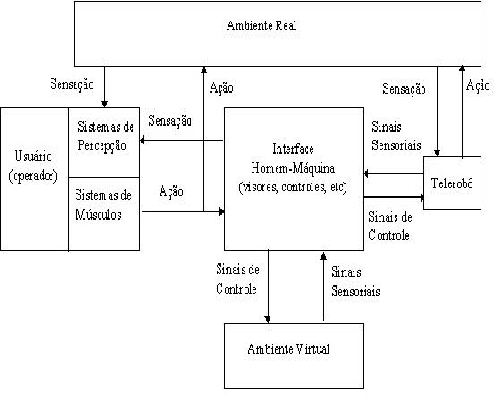
O Ambiente Virtual difere do Sistema de Telepresença na atuação sobre o ambiente. Enquanto a telepresença faz com que a interface atue sobre um telerobô que vai atuar sobre o mundo real, o sistema de realidade virtual faz com que a interface atue diretamente sobre o computador que vai atuar sobre um mundo virtual ou um mundo real simulado. Em telepresença e em outros casos, onde possa haver dificuldades de transferência ou tratamento em tempo real de imagens reais complexas, a substituição do mundo real por um mundo virtual equivalente pode resolver o problema, na medida em que as imagens podem ser geradas localmente. As transferências de informações podem ser reduzidas a dados de posicionamento.
Um Sistema de Realidade Aumentada é uma combinação da visão do ambiente real com o ambiente virtual (AZUMA, 1993; BOMAN, 1995; FEINER, 1993). Esse tipo de sistema é obtido mesclando-se sistemas de telepresença e realidade virtual, como mostrado na figura 2.4.
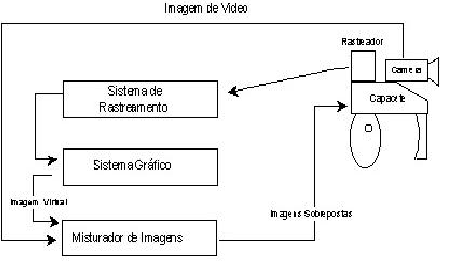
Um Sistema de Realidade Melhorada é uma variação do sistema de realidade aumentada, onde um sistema de processamento de imagem gera informações adicionais para serem sobrepostas à imagem real. O resultado final pode ser tanto uma melhoria espectral quanto espacial, gerando transformações e anotações sobre a imagem. A geração de imagens obtidas através de ampliação do espectro visível do olho humano e a anotação de características específicas dos objetos como distância, tipo, etc., são exemplos de melhoria de uma imagem (BOWSKILL & DOWNIE, 1995). Um exemplo de um sistema deste tipo é mostrado na figura 2.5.
A modelagem geométrica abrange a descrição da forma dos objetos virtuais através de polígonos, triângulos ou vértices, e sua aparência, usando textura, reflexão da superfície, cores, etc. A forma poligonal dos objetos pode ser criada, usando-se bibliotecas gráficas ou usando-se modelos prontos de bases de dados comerciais ou digitalizadores tridimensionais. Os objetos também podem ser criados por programas CAD ou com o uso de editores de realidade virtual. A aparência dos objetos está relacionada principalmente com as características de reflexão da superfície e com sua textura.
A modelagem geométrica de um objeto não é suficiente para conseguir uma animação. Para isto, deve ser possível agarrar o objeto, alterar sua posição, mudar a escala, detectar colisões e produzir deformações na superfície. A utilização de coordenadas locais dos objetos e de coordenadas gerais, juntamente com matrizes de transformação, permitirão a alteração das posições e as mudanças de escala (ROBINET & HOLLOWAY, 1992).
Os objetos virtuais também deverão ser modelados fisicamente pela especificação de suas massas, pesos, inércia, texturas (lisas ou ásperas), deformações (elásticas ou plásticas), etc. Essas características, em conjunto com a modelagem geométrica e com as leis de comportamento, determinam uma modelagem virtual próxima da realidade. A simulação mecânica do mundo virtual, para ser realista, deverá ser executada de maneira confiável, contínua, automática e em tempo real.
A modelagem geométrica e física de mundos virtuais com muitos objetos deverá resultar em um modelo muito complexo, difícil e caro de ser mostrado. Normalmente, esses mundos possuem vários espaços específicos, distâncias razoáveis e objetos móveis com velocidades diferentes. O problema da complexidade pode ser contornado por segmentação do mundo, alteração do nível de detalhe dos objetos, alteração de resolução de imagens, pré-computação, etc.
A segmentação do mundo baseia-se na divisão do mundo geral em mundos menores, de forma que somente os objetos do mundo menor sejam mostrados. É o caso de uma casa com diversas salas, onde cada sala é um mundo menor. Embora o mundo geral seja muito complexo, a visão do usuário sempre será mais simples.
Uma abordagem semelhante é usada para cenas de movimentação. Objetos que estejam movendo-se rapidamente, não conseguem ser vistos claramente. Assim pode-se representar os objetos rápidos de maneira simplificada, conseguindo o mesmo efeito e economizando processamento.
VRML (Virtual Reality Modeling Language) é uma linguagem independente de plataforma que permite a criação de cenários 3D, por onde se pode ``passear'', visualizar objetos por ângulos dife-rentes e interagir com eles. A linguagem tem como objetivo dar o suporte necessário para o desenvolvimento de mundos virtuais tridimensionais multi-usuários na Internet. O código VRML é um subconjunto do formato de arquivo ASCII do Open Inventor, da Silicon Graphics, com características adicionais para navegação na Web.
Para navegar em mundos virtuais criados com a linguagem é necessário o uso de browsers que suportem VRML. Assim, ao invés de visitar homepages, pode-se visitar homeworlds. Existem muitos browsers disponíveis que suportam diretamente a linguagem. Outros browsers que não suportam necessitam de software adicional (plug-in).
No contexto da Manufatura, VRML é um mecanismo de visualização de representações geométricas de diversas entidades relacionadas. Em conjunto com uma Interface Visual, dados de manufatura podem ser acessados, utilizando representações 3D. Os objetos VRML atuam como interface para a base de dados da manufatura.
Um Laboratório Virtual é um meio heterogêneo e distribuído de resolução de problemas que permite a um grupo de pesquisadores de diversos lugares no mundo trabalharem em um conjunto comum de projetos. No projeto e manufatura, uma empresa envolvida na produção de um produto grande e complexo, tal como um avião, deve ser capaz de simular processos diretamente para interagir com as bases de dados de projeto as quais contém especificações técnicas e de manufatura.
Os componentes de um laboratório virtual incluem:
Existem diversas situações em que a operação de um determinado dispositivo deve ser realizada através de um operador remoto, o qual encontra-se fisicamente distante do objeto de controle. Estes dispositivos remotamente operados vem sendo utilizados em diversas áreas tais como robótica, medicina, pesquisa submarina, etc (ADAM, 1985 e WITHAM et al. , 1985).
Geralmente, uma tarefa de manipulação remota requer uma máquina de propósito geral que possa realizar uma variedade de manipulações físicas. Muitas destas tarefas são altamente variáveis. As tarefas remotas variam em termos do local onde a tarefa tem que ser realizada e se a tarefa é conhecida a priori. Um sistema ideal para realizar estas tarefas tem que ter a mesma capacidade de um operador humano para reconhecer qual tarefa tem que ser realizada e quais passos devem ser tomados para sua realização, além de possuir flexibilidade para realizar manipulações físicas, de maneira análoga à operação de um humano.
Na prática, a maioria dos sistemas que realizam manipulação remota estão longe desta situação ideal. Necessitam, consequentemente, da capacidade humana para decidir qual tarefa deve ser realizada e para ensinar ao dispositivo como realizá-la. Como nestas situações não é possível a presença do operador humano no local em que se encontra o dispositivo, o que acontece é que o operador acaba indiretamente realizando a tarefa através de uma máquina teleoperada.
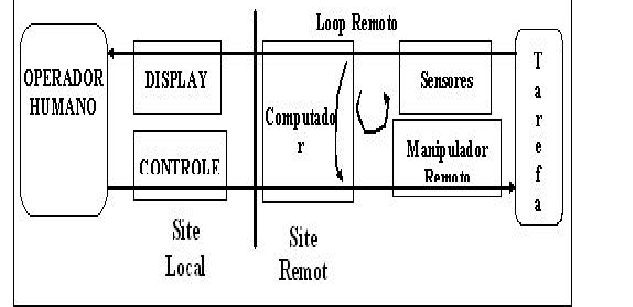
Quando o operador está fisicamente presente no local e realiza uma tarefa diretamente no disposi-tivo controlado, ele recebe diversos tipos de sinais de realimentação do resultado de suas ações, tais como realimentação visual, auditiva, táctil, de força, etc. Além disso, ele necessita, constantemente, mudar sua posição de observação para obter melhor informação de realimentação visual. Quando, por outro lado, o operador está fisicamente distante do dispositivo controlado e realiza alguma tarefa de manipulação, a realimentação de suas ações de controle tem que ser artificialmente transmitidas a ele. As informações mais relevantes do local remoto são capturadas através de sensores, enviadas ao operador e reproduzidas, proporcionando a realimentação necessária à tarefa de controle. A figura 2.6, mostra, esquematicamente, uma configuração típica para manipulação remota.
Nesta configuração, o dispositivo deve ser flexível o bastante para seguir os comandos de manipulação enviados pelo operador. Para isto, existem sensores no site remoto os quais são montados no dispositivo a ser controlado, fornecendo dados de realimentação necessários ao operador para que o sistema funcione em malha fechada. O número de sensores e o tipo de informação sensoreada varia com a tarefa a ser realizada, mas no mínimo uma câmera de vídeo deve estar presente, para que o operador possa visualizar o site diretamente. Estes sinais de sensores são transmitidos através de um link de comunicação e mostrados na interface do operador.
Um sistema de teleoperação tem vários componentes e requer conhecimento de muitas áreas dife-rentes. Diversos métodos de comunicação são utilizados para transmitir dados entre o site remoto e o site local, do operador, dependendo do meio de atuação do dispositivo controlado. Um dos componentes mais importantes de um sistema teleoperado é a interface do operador, já que determina a extensão daquilo que o operador pode sensorear no ambiente remoto e, consequentemente, controlar no manipulador. O display na interface do operador deve ser projetado de tal maneira que o operador receba informação suficiente a respeito do meio remoto. O controlador na interface do operador tem que ser projetado para que o operador possa, efetivamente, controlar o dispositivo (DRASCIC, 1991).
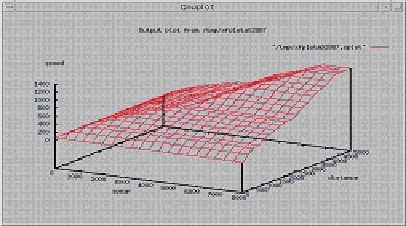
Aspectos importantes no efetivo controle de dispositivos remotos envolvem: o atraso entre uma ação de controle do operador e sua correspondente visualização, como informação de realimentação de sua ação, mostrada em seu display; largura de banda do sistema de comunicação, que determinam uma parcela importante do atraso relacionado à ação de controle; experiência na tarefa de controle contínuo, manual, do dispositivo controlado; questões de segurança e erros de posicionamento e autonomia (SHERIDAM, 1993; MASSIMINO, 1994, MCKINNON, 1988; STURGES, 1991; PETERS, 1988).
A questão da autonomia é particularmente importante, já que define o quanto o dispositivo teleoperado pode funcionar independentemente do operador humano. Isto pode ser obtido através da implementação de parte da estratégia de controle em um computador localizado no site remoto, como mostrado na figura 2.7. O operador pode estabelecer altos níveis de controle ao computador remoto, o qual pode executar os níveis mais baixos de controle.
Sistemas robóticos teleoperados vem sendo utilizados em diversos campos tais como automação da manufatura, exploração espacial, aplicações militares, etc. A principal vantagem associada a tais sistemas é que permitem que certas tarefas possam ser executadas sem que o operador esteja presente no local de execução das mesmas.
A Telerobótica pode ser considerada uma sub-área da Teleoperação e consiste na operação remota de robôs utilizando-se de um link de comunicação. Com a utilização crescente da Internet para tais aplicações, o termo mais comumente utilizado é o de Web Robots ou Internet Robots. Diversas aplicações vem sendo desenvolvidas, em diversas áreas: Robôs Móveis, Manipuladores, etc. (HIRZINGER et al. , 1997; WOLF & FREITZHEIN, 1997).
O controle e monitoração remota de máquinas permite o compartilhamento de recursos, de tal maneira que uma planta de fabricação possa envolver equipamentos distribuídos em diversos locais ou até mesmo diversos países. Isto é possível através da utilização da Internet.
A vantagem do uso da Internet como meio de troca de informações em sistemas teleoperados reside na relativa simplicidade na qual a informação é transmitida. Serviços tais como FTP, TELNET, WWW, etc. são disponibilizados e amplamente acessados.
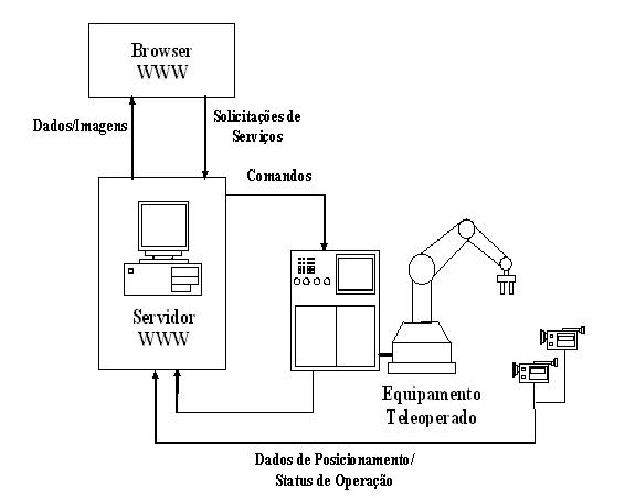
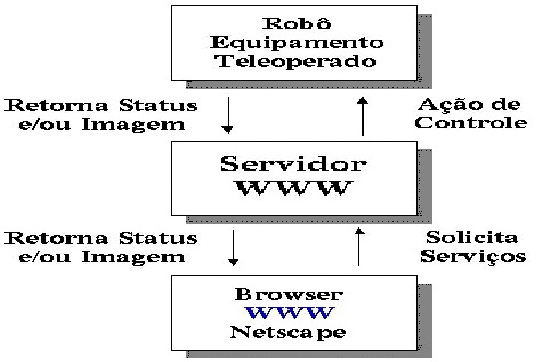
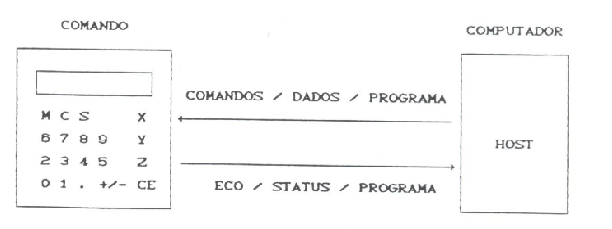
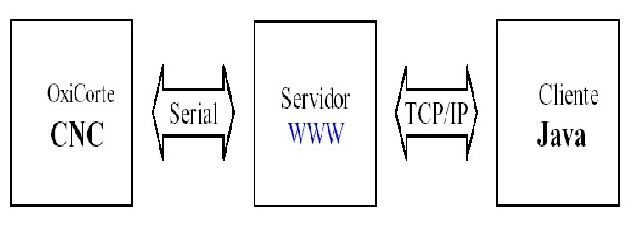
Sistemas controlados remotamente utilizam-se de comandos e dados do objeto controlado, os quais são transmitidos através de uma rede de comunicação de dados. Com a utilização da Internet, isto é feito através da utilização do Protocolo IP (WOLF et al. , 1997). A Arquitetura Cliente/Servidor, utilizando o protocolo HTTP, proporciona esta aplicação através de um Servidor WWW, como mostrado na figura 2.8.
A estratégia de controle baseia-se em realimentação de informações através de imagens e/ou dados de sensores de força, posicionamento, entre outros (FIORINI et al. , 1993).
Os principais fatores a serem considerados na implementação de tais sistemas são descritos a seguir (TAYLOR & DALTON, 1997; HANNAFORD, 1999):
O conceito de grupos desempenha um importante papel no trabalho diário. A proximidade física facilita a interação entre membros do grupo. Em muitas empresas, grupos são distribuídos através de cidades e até países. Neste cenário, o principal desafio destas empresas é manter o conceito de "grupo", independente das distâncias envolvidas. O conceito de telepresença apresenta-se como importante ferramenta para tais propósitos (BUXTON, 1992).
O termo telepresença refere-se ao uso de tecnologia para estabelecer o sentido de presença compartilhada ou de espaço compartilhado entre membros de um grupo, geograficamente separados. Isto envolve o conceito de presença em dois espaços: o da pessoa e o da tarefa.
O espaço de pessoa em telepresença é o sentido coletivo de co-presença entre/através dos participantes do grupo. Isto inclui suas expressões faciais, voz, olhar e linguagem corporal. O espaço de tarefa permite a co-presença no domínio da tarefa sendo realizada. Em alguns casos, os espaços de tarefa e de pessoa são os mesmos
A implantação destes espaços e, de maneira mais ampla, da telepresença envolve ferramentas de videoconferência com técnicas de projeção, para obter efeitos de conversação mais realistas, além de dispositivos de compartilhamento de ferramentas de projeto (BUXTON, 1992).
A telepresença que é implementada por mecanismos de teleoperação, consiste de um usuário, uma interface homem-máquina, um telerobô e um ambiente remoto, conforme a figura 2.9.
Muitos cursos da engenharia, incluindo cursos de Controle e Automação da Manufatura, normalmente usam a Web para demonstrações de softwares, tutoriais e gerência básica do curso. Entretanto, a necessidade de aulas práticas em laboratório está levando ao desenvolvimento de duas modalidades de uso da Web na área de Ensino a Distância (EAD): Laboratórios Virtuais e Laboratórios Remotos. Este uso da Web voltado ao ensino pode também ser voltado para gestão e controle da produção usando a mesma metodologia em especial nos chamados Laboratórios Remotos que também podem ser designados de Plantas Industrias Remotas em um contexto de Telemanufatura e Manufatura Virtual.
As demonstrações por meio de software de conceitos abstratos podem ser muito benéficas para a compreensão dos usuários em um determinado assunto. Por exemplo, o índice da frequência em um sinal no domínio do tempo pode ser ilustrado eficazmente usando uma aproximação através de multimídia interativo. Os estudantes mudam a amplitude dos componentes nos espectros da freqüência e vêem a forma de onda do sinal resultante no tempo ao escutar um sinal de áudio correspondente. Estes tipos de demos podem ser usados em sala pelo instrutor ou ser vistos individualmente pelos estudantes. Antes da Web, tais demos eram desenvolvidos isoladamente em diversas instituições de ensino usando os pacotes de software comerciais disponíveis ou mesmo gratuitos. Demos podem ser passivos ou interativos. Os demos interativos podem ser classificados em duas categorias: aqueles que necessitam de download para a execução do software excutando na máquina local, e aqueles que funcionam diretamente na Web usando Java Applets.
Os laboratórios virtuais são simulações de dispositivos físicos por meio de software. Estes podem ser considerados demos interativos sofisticados. Os laboratórios virtuais podem ser uma bancada de testes de um sistema visando elaborar métodos para o seu controle, ou mesmo a simulação de um sistema de manufatura baseado em Teoria de Filas. Se a simulação for muito detalhada, pode ser um bom substituto para um laboratório real, especialmente se acompanhado de animação. Os laboratórios virtuais acessíveis através da Internet/Intranet estão se transformando em uma maneira popular para reduzir custos de equipamento e disponibilizar conceitos através do laboratório em cursos de EAD. Estes tipos de laboratórios usam geralmente softwares comerciais como o LabView, o MATLAB, o Arena, o AutoMod, Sistemas CAD/CAM, entre outros. Por exemplo, o laboratório virtual para ensino de Processamento de Sinais da Universidade de Carnegie Mellon (STONICK, 1993) e o laboratório CAD/CAM desenvolvido em Java da Universidade de Berkeley (cybercut http://cybercut.berkeley.edu) são utilizados em Ensino a Distância (EAD) em algumas disciplinas dos cursos de Graduação e Pós-Graduação destas Universidades.
Conceitualmente, usar um browser como interface para o laboratório virtual tem muitas vantagens em conexões Intranet e/ou Internet. É uma plataforma independente, fácil de usar (os estudantes já são familiarizados com as ferramentas de navegação para a Web) e o software adicional necessário no lado do cliente (usuário remoto) é mínimo. Entretanto, a conexão Web fornece alguns desafios também: necessita-se de meios para que o estudante incorpore os parâmetros do controle (que usam preferivelmente uma interface gráfica amigável) e de meios de simular a resposta do sistema. O código padrão do HTML não pode realizar todas estas tarefas.
As páginas interativas da Web com indicadores gráficos para dados de entrada (isto é, parâmetros de controle) podem ser escritas usando programas em Commom Gateway Interface (CGI) ou Java Applets. Os programas em CGI são os executáveis que residem no lado do servidor em um Arquitetura Cliente/Servidor, onde o browser e as aplicações em Java representam o cliente, por exemplo. Mais recentemente, Java Applets estão sendo usados como entrada de dados em uma aplicação da Web. Programas na linguagem Java diferem dos programas em CGI que residem no lado do servidor; pois Java Applets rodam no lado do cliente executando o código localmente. Também os programas em CGI não mantêm, geralmente, a conexão Internet persistentemente aberta, o que pode ser um impedimento em aplicações em tempo real.
Um exemplo de laboratório virtual localiza-se na Universidade de Edimburgo (MERRICK et al. , 1996), o qual busca demonstrar os conceitos básicos do controle do processo. O laboratório virtual consiste de diversos experimentos de controle do processo químico. Cada "experiência" é acompanhada por uma descrição da teoria junto com uma fotografia de um dado real. Os estudantes podem introduzir parâmetros de controle e então simular o sistema em malha fechada. Os gráficos dos resultados são indicados aos estudantes.
O MATLAB tem uma vantagem sobre Java pois pode executar cálculos sofisticados de uma maneira numericamente robusta. É também uma ferramenta computacional padrão na comunidade de Automação e Controle. MATLAB pode ser lançado dentro de um browser de forma similar às aplicações Realvideo e Acroread, necessitando de um plug-in adequado ao browser. Os exemplos dos laboratórios virtuais que utilizam MATLAB na máquina do cliente para finalidades de simulação são apresentados em (LEE et al. , 1998) e (SCHMID, 1998).
Os laboratórios remotos permitem que experimentos reais do laboratório sejam controlados remotamente através de uma conexão Internet via Web, por exemplo. Este tipo de laboratório é bem adequado aos cursos de EAD onde os estudantes não necessitam estar fisicamente no laboratório. Os parâmetros de controle podem ser ajustados em uma página Web e enviados para o servidor que controla o experimento. Os dados reais são gravados durante o experimento retornando ao usuário através da conexão Web.
Um método comum para executar o controle remoto do equipamento ou de um experimento é através de uma conexão remota via telnet (emulação de terminal) em um outro computador que esteja controlando um experimento, chamado de servidor. Entretanto, Uma desvantagem deste método é a necessidade de uma conta no servidor além da ausência de uma interface gráfica, pois sendo textual ela é pouco amigável. A utilização de terminais gráficos (Xfree ou Windows) requer uma alta velocidade de transmissão de dados, sendo viável apenas em Intranet e conexões Internet de alta velocidade (ÁLVARES e TOURINO, 1999). Usar a Web para a conexão Internet é melhor que o telnet, pois requer apenas um browser padrão no lado do usuário (cliente). Além disso, o browser é uma plataforma independente no lado do usuário. O uso da Web em laboratórios remotos é uma atividade relativamente recente, alguns exemplos incluem: teste automatizado de circuitos analógicos (KNIGHT e WEERTH, 1996), laboratório remoto de medições, controle de robô (ÁLVARES, 2000), controle de processo químico (SHAHEEN et al., 1998) e controle de um máquina de oxi-corte CNC (http://weboxicorte.graco.unb.br).
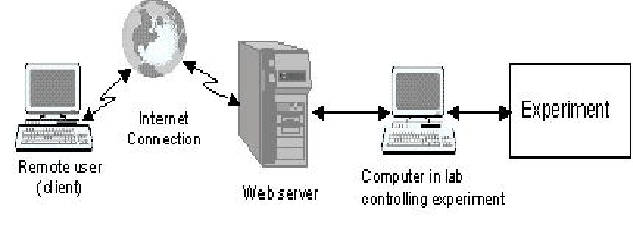
Os componentes da arquitetura de controle via Web são ilustrados na figura 2.10. Aqueles relacionados aos aspectos remotos são o cliente (usuário remoto) conectado através de um modem, conexão ADSL ou conexão de alta velocidade ao Servidor HTTP (Web) dedicado, que reside em um computador no local do laboratório. Os componentes relacionados diretamente ao experimento são o controlador/computador (pode ser o mesmo que o servidor Web) onde se realiza realmente o experimento e os equipamentos associados (placas, conversor A/D, CNC, Robôs, etc.). Os labo-ratórios são desenvolvidos utilizando programas em C++ ou software comercial específico, tal como LabVIEW, que residem no computador local, laboratório, coordenando os experimentos.
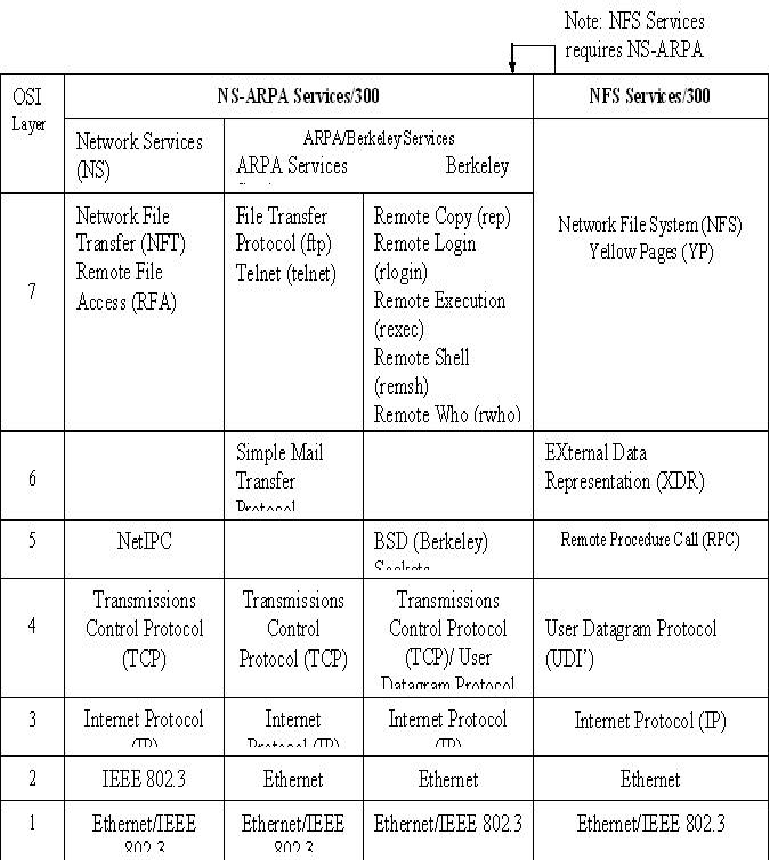
Nesta seção serão apresentados os conceitos de modelo cliente-servidor, o modelo ISO-OSI para comunicação de dados, e o conceito de canais de comunicação (HALL, 1999), (MEATCALFE, 1998) e (TOURINO, 2000).
O modelo da arquitetura cliente-servidor é um modelo de sistemas distribuídos que mostra como os dados e processamentos são distribuídos entre um conjunto de processadores. Os principais componentes desse modelo são:
A mais importante vantagem do modelo cliente-servidor é a sua fácil distribuição ou ampliação. É simples adicionar um novo servidor e integrá-lo gradualmente com o resto do sistema, ou mesmo atualizar os servidores sem afetar outras partes do sistema.
Um sistema de comunicações representa a forma na qual se realizam as trocas de dados e a passagem das informações de controle. O deslocamento desses dados é geralmente definido a partir do modelo de comunicação OSI (Open System Interconnection), definido pela ISO (International Organization for Standardization).
O modelo OSI divide em sete camadas o trabalho de deslocamento de dados de um ponto a outro. São camadas hierarquizadas que contribuem para o agrupamento ou separação de um pacote de dados. Esses pacotes de dados, além da informação propriamente dita a ser transmitida, levam em seu interior dados relativos à origem e destino na rede, assim como o protocolo empregado na codificação das informações transportadas. A figura 2.11 apresenta o modelo OSI/ISO e os protocolos mais utilizados em cada camada.
As camadas do modelo OSI são as seguintes:
O TCP (Transmission Control Protocol) e o UDP (User Datagram Protocol) são protocolos que percorrem encapsulados nos pacotes IP (Internet Protocol), sendo responsáveis pela comunicação de dados baseados em datagramas e baseados em fluxo.
Um protocolo baseado em datagrama é aquele que atribui um tamanho máximo à quantidade de dados enviada em uma única transmissão (como o UDP). Um protocolo baseado em fluxo (como o TCP) realiza a ``quebra'' da informação em pacotes menores e trata da reorganização desses pacotes, de forma que, para o usuário, a transmissão é realizada sem limites de quantidade de dados.
De forma comparativa, podemos diferenciar o UDP do TCP da seguinte forma:
Canais de comunicação (geralmente denominados de ``sockets'') são a forma de se realizar a comunicação entre dois computadores em uma rede. Os canais ligam dois computadores através de seus endereços IP e através de uma ``porta'' de comunicação. Esta comunicação pode ser reali-zada tanto através do protocolo UDP como pelo protocolo TCP. Comandos como ``telnet'' e ``ftp'' utilizam internamente em seu funcionamento o conceito de canais de comunicação.
De forma genérica um canal de comunicação é aberto especificando-se o endereço da máquina destino e a porta de comunicação a ser utilizada. Para o caso de uma comunicação TCP, a máquina remota recebe o endereço da máquina local, o que permite que uma conexão baseada em fluxo seja realizada entre as máquinas.
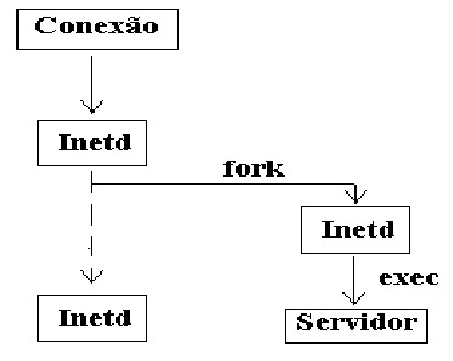
Nos sistemas UNIX, como o Linux, existe um processo responsável pela maior parte das conexões realizadas através de canais de comunicação. Esse programa, denominado ``inetd'', aguarda conexões de rede e as direciona para programas servidores, como o ``telnetd'', responsável por conexões ``telnet''.
A configuração do inetd é armazenada no arquivo \etc\inetd.conf. A sintaxe dos dados contidos no arquivo segue a seguinte forma:
Os termos referidos acima possuem os seguintes significados:
Deve-se lembrar que o servidor deve estar listado no arquivo /etc/services, onde é definida a porta que o servidor atende. No caso do servidor de telnet, sua configuração é a seguinte:
onde temos a utilização da porta 23 sob o protocolo tcp.
A utilização do inetd é vantajosa sobre a programação convencional utilizando diretamente os canais de comunicação pois reduz a carga sobre o sistema operacional e facilita o desenvolvimento de programas que realizam comunicação via Internet.
A Infra-estrutura de Rede de Alta Velocidade deve disponibilizar diversas tecnologias para suportar diferentes aplicações, as quais utilizam parâmetros diversos de Qualidade de Serviço: Velocidade de Transmissão, Atraso (Delay), Throughput, Agendamento e Taxa de Perda.
A velocidade de transmissão define a faixa de valores na qual a velocidade de uma determinada conexão deve estar; o atraso define o máximo de interrupção aceitável para um sinal na rede, de modo a garantir o fluxo contínuo de transferência da informação; o throughput define a quantidade de dados transmitidos em uma unidade de tempo; o agendamento define o horário em que uma determinada conexão deverá estar disponível e a taxa de perda define a taxa máxima esperada de perda de pacotes na unidade de tempo.
No Brasil esta infra-estrutura de rede é disponibilizada pelo Backbone da RNP que conecta as instituições de ensino superior, em especial a UnB e a UFSC. Futuramente teremos conectividade através da Internet 2, onde o backbone terá uma maior largura de banda, sendo mais adequado para aplicações de manufatura remota e virtual.
As principais tecnologias disponibilizadas através desta plataforma de Rede envolvem:
Neste capítulo será apresentada uma compilação das principais tecnologias, protocolos e ferramentas disponíveis para o desenvolvimento de aplicações baseada no protocolo TCP/IP. Este capítulo é baseado no projeto elaborado pelo autor sobre ensino a distância para disciplinas de graduação do curso de Engenharia Mecatrônica da Universidade de Brasília. O projeto está disponível na URL ftp://graco.unb.br/pub/publicacoes_graco/ensino_a_distancia.pdf.
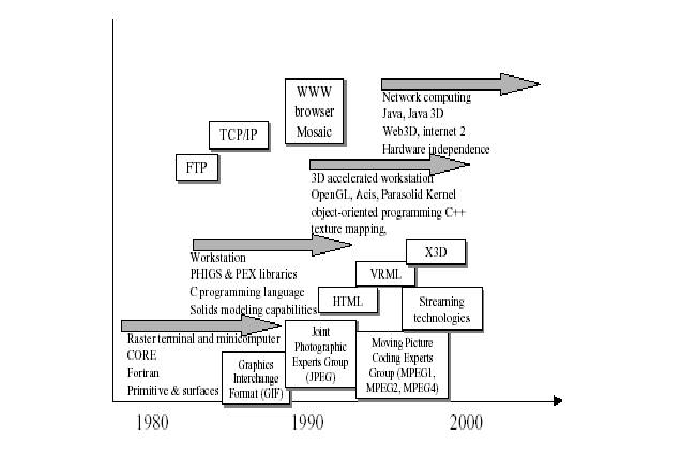
O serviço WWW surgiu em 1989 como um integrador de informações, dentro do qual a grande maioria das informações disponíveis na Internet podem ser acessadas de forma simples e consistente em diferentes plataformas. A forma padrão das informações do WWW é o hipertexto, o que permite a interligação entre diferentes documentos, possivelmente localizados em diferentes servidores, em diferentes partes do mundo. A figura 3.1 apresenta a evolução da Internet apresentando os diversos protocolos desenvolvidos ao longo dos anos.
O hipertexto é codificado com a linguagem HTML (Hypertext Markup Language), que possui um conjunto de marcas de codificação que são interpretadas pelos clientes WWW (que são os browsers, como o Netscape), em diferentes plataformas. O protocolo usado para a transferência de informações no WWW é o HTTP. O protocolo HTTP é um protocolo do nível de aplicação que possui objetividade e rapidez necessárias para suportar sistemas de informação distribuídos, cooperativos e de hipermídia. Suas principais características são:
A partir dos trabalhos de (SCH, 1995), (MAR, 1996) e (LOH, 1996) pode-se apresentar as principais vantagens do WWW :
Ao se avaliar a efetividade do uso do WWW na manufatura remota é imprescindível a realização de um estudo e avaliação das várias ferramentas disponíveis para prover recursos avançados no WWW, tais como interatividade, animações, simulações e mundos virtuais a este serviço. Assim, nesta seção serão apresentados os Forms/CGI (Common Gateway Interface) e Servlets, bem como as linguagens Java, Javascript e VRML (Virtual Reality Modeling Language). Serão apresentados os fatores relevantes na avaliação destas ferramentas para verificar se o seu uso tem o potencial de prover um hiperdocumento interativo, eficiente e de alta de qualidade.
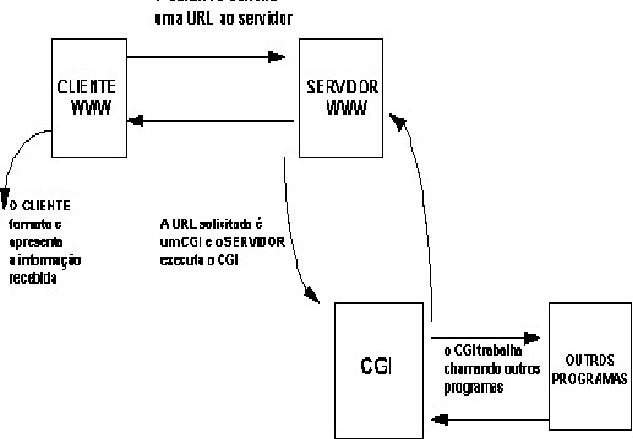
O Form é um elemento da linguagem HTML que permite que o usuário forneça dados a uma aplicação de hiperdocumento, através do preenchimento de campos de um formulário. Esses dados são enviados para um servidor HTTP, onde serão interpretados e processados por uma CGI (common gateway interface).
Uma CGI (common gateway interface) é colocada em um servidor WWW para realizar a interface deste com programas externos. Assim uma CGI atua como um gateway entre o servidor WWW e bases de dados, aplicações locais ou geradores de documentos. O funcionamento de uma CGI é descrito abaixo:
Servlets são módulos de código Java que ``rodam'' em uma aplicação no servidortypeset@protect @@footnote SF@gobble@opt Servlets estão para o lado do servidor, assim como Applets estão para o lado do cliente. respondendo a uma solicitação do cliente. Servlets não tem um protocolo específico cliente/servidor, sendo utilizados em conjunto com o servidor HTTP. O servidor mais utilizado com o Apache é o TomCat. Servlets fazem uso das classes estendidas padrão Java disponíveis nos pacotes javax.servlet e javax.servlet.http. Usos típico de HTTP Servlets incluem:
A linguagem Java torna possível a criação de aplicações multimídia interativas as quais serão executadas localmente nas máquinas clientes de forma independente da plataforma, bastando que o usuário possua um browser Web com capacidade de interpretar código em Java instalado em sua máquina.
Dessa forma a linguagem Java abre um grande número de novas perspectivas em direção à criação de ambientes integrados para aplicações em CAD/CAPP/CAM (http://cybercut.berkeley.edu), Modelagem Cooperativa na etapa de Projeto Detalhado (webspiff http://www.webspiff.org), Prototipagem Rápida (http://www.ia.ee.ccu.edu.tw e http://tmf.sdsc.edu), entre outras.
Com os applets escritos em Java, é possível desenvolver-se páginas Web incluindo animações, gráficos 2D e 3D, computação, aplicações distribuídas e comunicação. No entanto o maior destaque desta linguagem é a possibilidade de criar páginas Web altamente interativas. Segundo HORSTMANN E CORNELL (2000), Java transforma a Web em um sistema de distribuição de software, onde o usuário tem "coisas para fazer" e não apenas "lugares para ir". O Java pode mudar o comportamento dos usuários da Web, que deixarão de apenas "surfar" para também ``trabalhar'', "jogar", "interagir" e "aprender" nos novos ambientes interativos. Também acredita-se que a linguagem Java irá melhorar muito o suporte à cursos via Internet através do uso de simuladores escritos nesta linguagem, os quais auxiliarão no aumento do envolvimento dos alunos nas sessões de aprendizagem remota, ajudando-os a aprender através da experimentação e visualização (MIR, 1996).
Em primeiro lugar deve-se criar o código fonte Java, gerando um arquivo ``.java''. Compila-se o código fonte, gerando um arquivo ``.class'', o qual contém um formato de dado chamado bytecode, que posteriormente poderá ser interpretado por um cliente WWW com capacidade de interpretar Java.
Cria-se um documento HTML, contendo a chamada da applet Java, através da tag <APP>. Copia-se o arquivo ``.class'' para o mesmo diretório do documento HTML que faz a sua chamada, por exemplo. Quando um cliente WWW com capacidade de interpretar Java carrega este documento HTML e lê a tag <APP>, o cliente WWW gera um comando HTTP GET e faz o download do arquivo ``.class''. O cliente WWW então interpreta os bytecodes contidos no arquivo .class, e executa a applet na máquina do cliente. O grande obstáculo no uso desta linguagem é que a geração do código fonte em Java exige uma grande experiência em programação, já que a utilização desta linguagem está longe de ser simples como a utilização da linguagem HTML.
A linguagem Javascript foi criada pela Netscape com o objetivo de obter uma linguagem intermediária entre a linguagem Java e a HTML, de tal forma que fosse complementar e integrada a estas duas linguagens. Assim o Javascript é fácil de usar, aberta, e tem capacidade de ligar objetos e recursos tanto da linguagem Java como da HTML. Enquanto as applets Java são desenvolvidas apenas por programadores, o Javascript pode ser usado por autores de páginas HTML para controlar a interação e comportamento de suas páginas.
Um dos principais benefícios que o Javascript oferece é a capacidade de reduzir o tráfego da rede através da execução local de tarefas simples. Assim, ao invés do servidor executar as tarefas e retornar os resultados para o browser, este último pode manipular algumas tarefas localmente, com um menor tempo de resposta. A linguagem Javascript é interpretada pelos browsers Web que possuem este recurso (por exemplo, o Netscape e Internet Explorer).
O código da aplicação Javascript é recuperado pelo browser Web na forma de texto, juntamente com o documento HTML. Com o Javascript pode-se facilmente implementar respostas a eventos do usuário, tais como cliques do mouse, movimentos do mouse sobre um link, e entrada de dados em um formulário. Dessa forma é de grande utilidade na criação de interfaces mais explicativas ao usuário. Também é possível criar páginas dinâmicas, cujo conteúdo muda de acordo com as requisições do usuário, ou mesmo disparar sons ou executar applets quando o usuário entra ou sai de uma página, permitindo assim uma maior interatividade com o usuário. Outra aplicação bastante comum da linguagem Javascript é a validação de formulários, ou seja a verificação dos dados que o usuário digitou no formulário, antes que estes sejam submetidos ao programa CGI, aumentando a performance do servidor e também diminuindo a frustração do usuário. A linguagem Javascript é de aprendizado bem mais simples que a linguagem Java, no entanto exige um esforço consideravelmente maior do que a linguagem HTML, já que apesar de sua simplicidade a linguagem Javascript é baseada em linguagem de programação, o que a torna muito mais sofisticada do que a linguagem HTML.
VRML (Virtual Reality Modeling Language) é uma linguagem de descrição de simulações interativas com vários participantes se comunicando através da Internet. Espera-se que todos os aspectos referentes a apresentação, interação, internetworking de um mundo virtual possam ser especificados usando VRML. A intenção dos projetistas desta linguagem é torná-la padrão para a descrição de simulações interativas no WWW, assim como a linguagem HTML é o padrão para descrição de páginas Web. A primeira versão (VRML 1.0) foi concebida em 1994, e foi projetada seguindo três requisitos principais (BEL, 1995):
Um fator importante na efetividade dos recursos avançados do WWW é a configuração mínima de hardware necessária para o usuário final executar tais recursos. Apesar deste recursos poderem ser executados em diversas plataformas (PC, Macintosh, Sun, Linux, etc), pode-se notar que todos os recursos avançados podem ser executados utilizando uma configuração de hardware que atualmente é bastante comum.
Softwares necessários para o usuário final executar os recursos avançados em questão:
Softwares necessários para o desenvolvimento de recursos com as ferramentas de implementação em questão, são:
Quando se utiliza plataforma Unix, em especial Linux, tem-se uma grande quantidade de softwares open source, que estão disponíveis para o desenvolvimento de aplicações, além da grande facilidade de se trabalhar em ambiente de rede (TCP/IP) pois todo o sistema (kernel, ambiente XFree86 e aplicações) foram concebidos para operarem em ambiente multiusuário, distribuído e compartilhado de uma forma nativa, sendo mais confiável, robusto e transparente que o ambiente Windows. Assim, para o desenvolvimento de aplicações em uma arquitetura Cliente/Servidor a plataforma Unix (Linux, FreeBsD, Solaris, entre outras) é mais adequada.
No trabalho de implementação computacional da metodologia de integração CAD/CAPP/CAM baseada na Web, a ser desenvolvido na Tese, será utilizado a plataforma Linux e em especial as facilidade disponibilizadas pela distribuição SuSE (http://www.suse.com e ftp://custom.lab.unb.br/pub/suse).
É importante se avaliar o grau de dificuldade envolvido na aprendizagem e uso da ferramenta de implementação, em função do conhecimento básico exigido:
Devido a dificuldade de implementação encontrada em alguns destes recursos, é importante a verificação da existência de ferramentas auxiliares que facilitem tal implementação.
As ferramentas auxiliares na criação de CGI's são bastante úteis, permitindo que usuários sem conhecimento em programação possam inserir este recurso em suas páginas. No entanto estas ferramentas ainda são pouco genéricas, geralmente permitindo apenas a criação de formulários e CGI's para atender a um objetivo específico.
As ferramentas auxiliares na criação de applets Java ainda se restringem à ambientes de desenvolvimento integrados denominados de IDE (VisualJava, VisualCafe, JavaBorland, entre outros), os quais facilitam o trabalho dos programadores, mas está longe de solucionar o problema das pessoas com pouco ou nenhum conhecimento em programação.
Quanto ao VRML, existem as ferramentas de autoria de documentos VRML, que são semelhantes às ferramentas de autoria de documentos HTML. Os conversores permitem a criação de documentos VRML usando CAD ou softwares de modelagem 3D, no entanto, segundo SCO (1996), estes conversores tendem a gerar arquivos VRML grandes e ineficientes.
Segundo CITRIX (2001) os modelos de computação distribuídos, utilizando uma rede de computadores, podem ser divididos em quatro categorias:
O modelo de "Computação Baseada em Servidor" é uma eficiente evolução do ambiente de rede tradicional, e oferece às organizações uma maneira de expandir seus recursos computacionais, simplificar o desenvolvimento e a manutenção de seus sistemas aplicativos, além de diminuir o custo de propriedade dos mesmos. Esse tipo de utilização permite que todas as aplicações sejam desenvolvidas, mantidas, gerenciadas e executadas 100% a partir do servidor Metaframe. O modelo de ``Computação Baseada em Servidor" tem 3 componentes críticos:
A arquitetura do Metaframe XP baseada em servidor retém todo o tráfego gerado no backbone da rede local. Somente as modificações das telas, os movimentos do mouse e os caracteres digitados no teclado é que trafegam pela rede e meios de comunicação, consistindo agora numa pequena fração de todo o tráfego gerado pela aplicação corporativa tradicional. Isso permite que os usuários, locais ou remotos, tenham um excelente tempo de resposta em seus aplicativos, mesmo através de redes congestionadas. A redução do tráfego gerado nas redes pode ser revertida em eliminação de custos de comunicação de dados. O Metaframe XP é otimizado para trabalhar em conexões de baixa velocidade como 14.4 kbps. Os usuários remotos podem ter bons resultados e tempos de respostas adequados, independentemente de estarem trabalhando em filiais, escritórios, hotéis, residência, etc. De fato, o Metaframe XP ajuda as aplicações a executarem de forma muito rápida sobre qualquer infra-estrutura de comunicações, incluindo roteadores, nós remotos, linhas discadas, etc.
Utilizando a arquitetura Citrix é possível obter a conectividade de qualquer cliente (Windows, Unix, entre outros). Os usuários podem ter total acesso aos sistemas e aplicações disponíveis, de acordo com os perfis previamente definidos pelo administrador da rede. Isso quer dizer, que os usuários apesar de estarem operando de forma remota em qualquer lugar, somente terão acesso aos sistemas e às informações que tiverem direito de ver ou a manipular. As aplicações que serão disponibilizadas serão aquelas aplicações escritas em ambiente Windows 16 e 32 bits, aplicações residentes em Mainframes ou servidores Unix através de emuladores, aplicações tradicionais do tipo Cliente/Servidor e aplicações escritas em linguagem Java. Seja qual for a linguagem ou tecnologia empregada pela aplicação, o usuário terá a visibilidade e a operação do sistema a partir de qualquer lugar e utilizando qualquer tipo de equipamento/sistema operacional.
Pode-se gerenciar e expandir o alcance das aplicações corporativas de missão crítica com as ferramentas específicas do Metaframe através da publicação das aplicações na WEB. Com a ferramenta "Application Lauching and Embedding" (ALE), pode-se disponibilizar os sistemas de CAD/CAM comerciais, por exemplo, através da Internet, reduzindo o tempo e os custos dos projetos, sem a necessidade de decodificar as aplicações a serem disponibilizadas na WEB. Com o processo de publicação de aplicações via WEB, os usuários autorizados poderão acessa-las como qualquer outro recurso da rede. Um exemplo está disponível na URL http://beat.graco.unb.br.
SATVIEWER é uma software baseado na WEB utilizando a API Java 3D para visualização gráfica de modelos sólidos de componentes mecânicos através da Internet. O software foi implementado como um Java applet que pode ser acessado usando um browser Internet para visualizar os modelos sólidos em formato padrão ``.SAT'', utilizado pelo kernel de modelagem sólida ACIS. Para utilização do applet é necessário a instalação da versão Java 1.2.2 JRE e Java3D JRE.
A URL http://caec.me.ufl.edu/ akumar/satviewer/satviewer.htm apresenta a página do sistema SATVIEWER desenvolvido na University of Florida, Department of Mechanical Engineering.
JavaCAD é um applet que permite a modelagem 2D de peças através da Internet, permitindo o projeto e compartilhamento de informações para todo o mundo. A URL http://www.cad.delhi.nic.in/ nougain/java.html apresenta a página do sistema.
Este aplicativo permite a conversão de um arquivo ``.WRL'' (formato VRML) para o formato ``.SAT'' (ACIS). A URL http://www.me.cmu.edu/faculty1/shimada/gm98/project/jorge/project/index.html apresenta uma descrição do projeto e o algoritmo desenvolvido.
JGV é uma programa em Java que permite a movimentação de objetos 3D em páginas Web. Os usuários podem rotacionar, escalonar e translador os objetos utilizando o mouse. JGV difere dos visualizadores VRML pois é escrito em Java, significando que é possível utliza-lo em qualquer browser com capacidade Java. A URL http://www.geom.umn.edu/java/JGV/ apresenta a página do visualizador. O formato do arquivo é ``OOGL'' usado pelo sistema Geomview.
CADVIEWER é um applet que permite a visualização de arquivo no formato ``.DWF'' e ``.SVF'', gerados pela maioria dos sistemas CAD da atualidade, permitindo sua visualização através da Web. Um exemplo do seu uso está disponível na URL http://www.graco.unb.br/alvares/cadviewer/old/demo.html, onde é apresentada uma planta baixo do laboratório do Graco. É um produto comercial desenvolvido Cadviewer (http://www.graco.unb.br/alvares/cadviewer/trial/index.htm).
Este capítulo apresenta uma metodologia para o desenvolvimento de sistemas de teleoperação baseados na Web. Inicialmente é apresentada uma revisão do estado da arte sobre o tema. A seguir é apresentado a metodologia desenvolvida pelo doutorando e os sistemas implementados no Graco para teleoperação de pan-tilts, Robôs Industriais, Robôs Móveis e Máquinas de Oxi-Corte CNC, sendo este último discutido no capítulo 5. A grande maioria de desenvolvimentos de sistemas de teleoperação são voltados para a área de Robótica Industrial e Robótica Móvel. Cabe destacar a edição especial da revista ``Robotics & Automation Magazine'' publicada pela IEEE denominada ``Robots on the WEB - Global Remote Control Through Internet Teleoperation'', onde alguns sistemas desenvolvidos pelo doutorando são citados como referência (IEEE, 2000).
A Teleoperação é definida como o controle contínuo e direto de um teleoperador/teleoperator. Teleoperador é um manipulador que requer comandos ou supervisão de um operador humano remoto (NOF, 1999). Telepresença refere-se à intensa utilização de realimentação sensorial para a teleoperação, fornecendo realismo para o operador em uma abordagem idealizada de "presença a distância".
Telerobótica amplia o domínio do manipulador em um contexto de controle compartilhado pela máquina e pelo operador humano. Um sistema Teleoperador/Teleoperator (NOF, 1999) consiste de uma unidade remota (manipulador), uma unidade de comando para entrada dos comandos do operador (interface homem/máquina) e um canal de comunicação como elo de ligação da unidade de comando com a unidade remota.
Inicialmente desenvolvida para a manipulação de materiais radioativos, a teleoperação permite que um operador exerça força e realize movimentos sobre uma máquina remota, e ainda receba realimentação sensorial, geralmente através de dados visuais, sonoros ou táteis. Com a introdução da tecnologia de teleoperação, foi possível o desenvolvimento de interfaces capazes de prover uma interação satisfatória entre homem e máquina, permitindo que serviços de grande destreza fossem realizados.
Foram propostos um grande número de sistemas de classificação para descrever a teleoperação. Um desses categoriza os sistemas de teleoperação tomando como base o grau de automação do sistema. Em um espectro variando da mínima para a máxima autonomia, a teleoperação pode ser classificada como (ZHAI, 1991):
A teleoperação requer a sinergia entre homem e máquina. O operador está envolvido no controle e na supervisão do sistema através de um console de operação e da correspondente interface homem-máquina. O console do sistema é uma estação gráfica a partir da qual o operador controla e supervisiona o sistema remoto, assumindo a existência de realimentação visual. Esta característica torna a interface homem-máquina uma peça fundamental do sistema.
A principal característica da interface é a integração de todas as informações necessárias à operação do sistema e relevantes ao operador num único écran, incluindo a exibição de imagens de vídeo, modelos virtuais e interfaces gráficas de controle. A interface homem-máquina tem como objetivo principal proporcionar um controle supervisionado realista e intuitivo que permita: monitorar continuamente a operação via displays baseados em vídeo ou ambientes virtuais; intervir interativamente e modificar os objetivos pela aplicação de comandos de controle enquanto opera a Spaceball ou o mouse na interface gráfica .
A Internet possui uma grande facilidade de criação de ambientes gráficos, o que facilita a interface com o usuário, além de possuir um baixo custo em relação ao equipamento teleoperado. Sendo uma rede de comunicação é possível enviar e receber informações, que podem ser comandos para serem executados em algum dispositivo ligado a rede, esse dispositivo pode ser um sistema robótico (TAYLOR e TREVELYAN, 1995) ou uma máquina-ferramenta CNC (KAO e LIN, 1996). Uma das características mais importante sobre o funcionamento de uma rede é a taxa de transmissão. Como normalmente os comandos transmitidos não exigem uma grande taxa de transmissão o que não implica em um empecilho à implementação de sistemas telerobóticos operados via Internet.
Outro aspecto importante é a possibilidade da teleoperação ser executada a partir de qualquer local conectado a Internet a um custo insignificante, o que se apresenta como uma solução bastante interessante (ÁLVARES et al. , 1999 e 2000). A teleoperação baseada na Internet pode ser realizada através de várias metodologias (ÁLVARES e TOURINO, 2000) a partir de uma arquitetura cliente/servidor. Dentre as quais destacam-se:
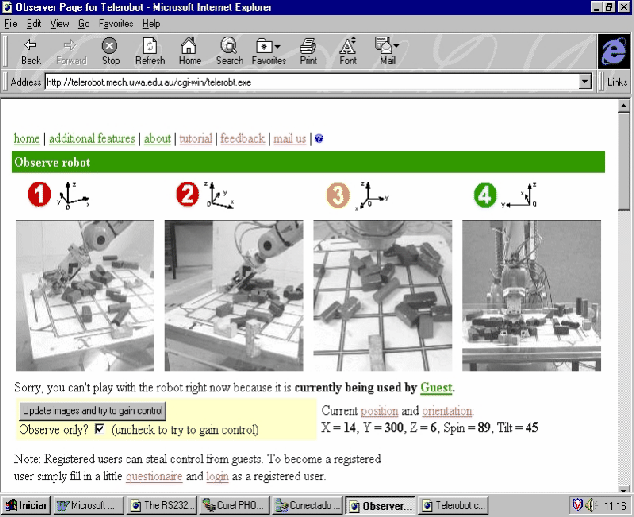
A TeleRobótica utilizando a Internet como link de comunicação é um novo campo de pesquisa que se desenvolve na área da Teleoperação tendo muitos grupos de pesquisa atuando nesta promissora área da Telemática (MONTEIRO et al. , 1997), principalmente em função dos baixos custos de acesso à Internet. Uma das primeiras aplicações de TeleRobótica via Internet foi o sistema desenvolvido por TAYLOR & TREVELYAN (1995) na University of Western Australia em 1994. Este sistema é constituído por um Robô Industrial sendo controlado via Interface WWW (World Wide Web), permitindo a manipulação de objetos com a utilização de uma garra. Este sistema pode ser acessado através do endereço http://telerobot.mech.uwa.edu.au. A figura 4.1 apresenta a interface com o usuário deste sistema. A partir deste sistema, inúmeros outros foram desenvolvidos por vários grupos de pesquisa em todo o mundo. Uma lista de algumas aplicações pode ser encontrada em http://dir.yahoo.com/Computers_and_Internet/Internet/Interesting_Devices_Connected_to_the_Net/Robots. Dentre estes, têm-se a teleoperação de Robôs Móveis (KLAUS et al. , 1997 e HIRZINGER et al. , 1997), Webvideo e manipuladores (ÁLVARES & ROMARIZ, 1998 e WOLF & FREITZHEIN, 1997), televigilância (ALMEIDA et al. , 1995), entre outras.
A TeleRobótica pode ser definida como sendo uma área da Telemática e da Robótica voltada à teleoperação de sistemas robóticos utilizando-se de um link de comunicação (KLAUSS et al. , 1997). Uma nova terminologia está sendo empregada no caso de se utilizar a Rede de Comunicação Internet como link de telecomunicações. Neste caso, designa-se sistemas World Wide Web Robots, WebRobots ou simplesmente Internet Robots. Esta terminologia é válida para aplicações que utilizam Robôs Industriais, Manipuladores, Pan-Tilt, Máquinas de Comando Numérico e outros equipamentos industriais similares.
É desejável o controle e a monitoração de máquinas remotamente, centralizando sua supervisão, possibilitando o compartilhamento de pessoal e de recursos materiais e minimizando custos. Outra vantagem está associada à localização da aplicação que poderá estar na mesma planta industrial ou mesmo em outro país ou continente, possibilitando a conexão e a utilização dos serviços disponibilizados através da Rede de Comunicação Internet, sendo o cliente independente da aplicação tanto do ponto de vista geográfico quanto temporal.
A utilização da Internet como link de telecomunicações, na TeleRobótica, possibilita a diminuição de custos de comunicação, viabilizando aplicações voltadas ao suporte técnico, à manutenção e reparos, laboratórios remotos, controle de máquinas e robôs em locais que anteriormente eram inviáveis economicamente. Aplicações típicas de teleoperação no passado incluíam ambientes hostis (deserto, espaço, águas profundas, entre outros) e trabalhos tediosos (inspeção de oleodutos, ferrovias, etc.).
Atualmente, com links de comunicação via Internet/Intranet, por meio de fibra óptica, satélite, ADSL, modem e/ou rádio pode-se estabelecer uma conexão de qualquer parte do mundo a um Computador Servidor de Tarefas Industriais que disponibiliza uma série de serviços para a aplicação em questão. Plantas industriais, portanto, podem ser monitoradas e supervisio-nadas remotamente a um custo extremamente baixo (MONTEIRO et al. , 1997). Tarefas típicas como telediagnóstico de mal-funcionamento, telemanutenção e ambientes que implementem atividades de telemanufatura podem ser executadas diretamente do escritório do fornecedor ou mesmo de outra filial/matriz da empresa situada a milhares de quilômetros.
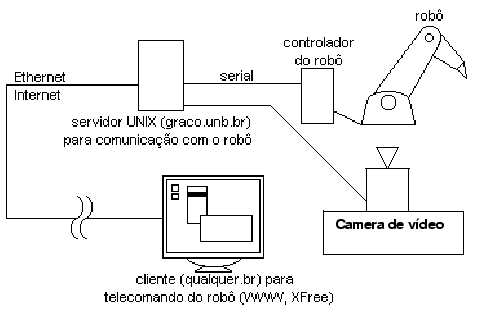
Sistemas teleoperados remotamente necessitam de dados e/ou imagens do objeto de controle, bem como da transmissão de comandos através de um link de comunicação, que neste caso é baseado em conexão via Rede de Comunicação (WOLF et al. , 1997), através do Protocolo Internet (IP). A metodologia proposta, implementada e testada para TeleRobótica utilizando a Internet como link de comunicação é baseada na Arquitetura Cliente/Servidor utilizando o Protocolo HTTP (Hypertext Transfer Protocol) através de um Servidor WWW convencional (CERN, NCSA ou APACHE) que disponibiliza uma interface multimídia. Esta pode ser acessada através de um Cliente WWW (browser) como o Netscape, Arena ou Internet Explorer (ECKEL & HARE, 1995).
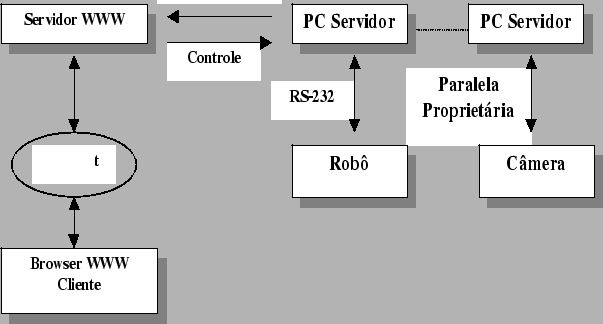
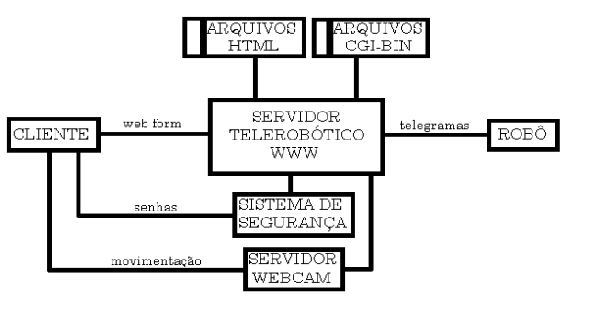
A arquitetura proposta do sistema é apresentada na figura 4.2. Como exemplos de equipamentos teleoperados têm-se: manipuladores com vários graus de liberdade; câmeras de vídeo, pan-tilt, robôs industriais, robôs móvel, máquinas de soldagem, máquinas de comando numérico, controladores lógicos programáveis, brinquedos; entre outros. Estes equipamentos são conectados ao servidor WWW, normalmente, através de uma interface serial, paralela, proprietária ou mesmo, via Rede Local de Comunicação Ethernet. O Browser WWW conecta-se ao Servidor WWW através do protocolo TCP/IP (Transport Control Protocol/Internet Protocol) podendo utilizar ligação discada (115 kbps) ou uma linha dedicada T1 ou T3 a 1,4 Mbps e 45 Mbps, respectivamente.
O cliente interage com o Servidor WWW utilizando a linguagem de programação HTML (Hypertext Markup Language). Os dados enviados ou solicitados pelo cliente utilizam o mecanismo de solicitação/resposta do Protocolo HTTP, disponibilizado pelo servidor. Os dados solicitados/enviados pelo usuário são codificados em URI/URL (Universal Resource Identifier/Uniform Resource Locator) e enviados para o Servidor HTTP.
O servidor extrai as informações da URI, mais especificamente da URL, processa-as e retorna uma resposta HTTP. Uma URL é um subset de uma URI, sendo esta o endereço de um arquivo acessado via Internet (http://www.whatis.com/url.htm). A figura 4.3 apresenta este mecanismo.
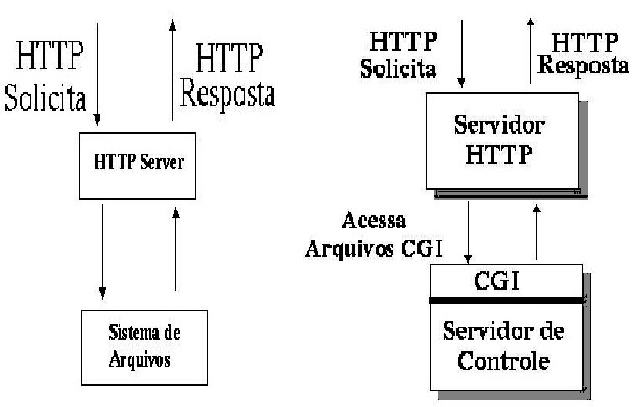
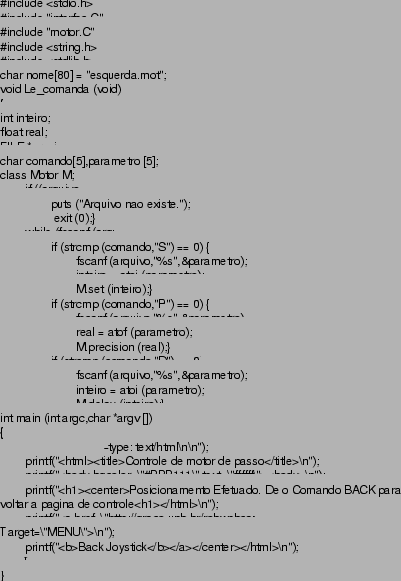
O Servidor HTTP utiliza-se de um recurso muito poderoso chamado CGI (Commom Gateway Interface). Através desta extensão do HTTP (ECKEL & HARE,1997) é possível executar um programa em "C" ou Perl, ou em outra linguagem ou script, para realizar uma determinada tarefa, conforme descrito no capítulo três. Por exemplo, pode-se executar um programa compilado especialmente para ser utilizado em um Servidor WWW, que controla o acionamento de um motor de passo através da conexão a um drive de potência do motor à interface paralela do servidor (ÁLVARES & ROMARIZ, 1998). A figura 4.4 apresenta o mecanismo CGI, onde a URI aponta para o programa executável. A figura 4.5 apresenta uma parte do código fonte deste programa em linguagem "C" para controlar o acionamento de um motor de passo.
|
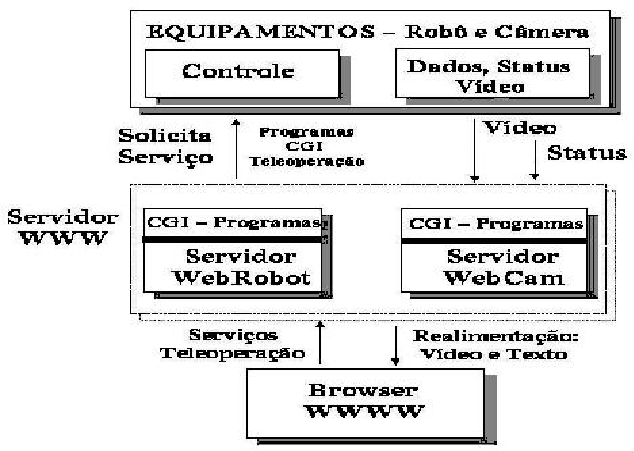
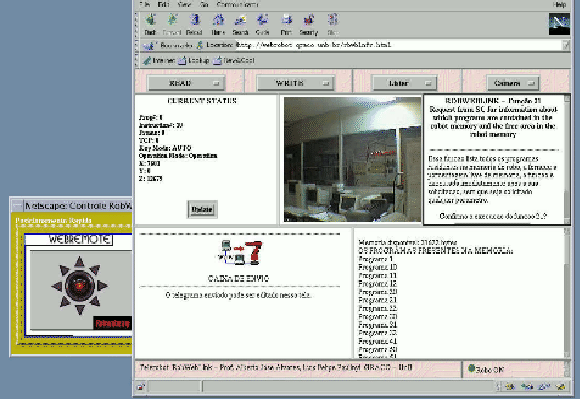
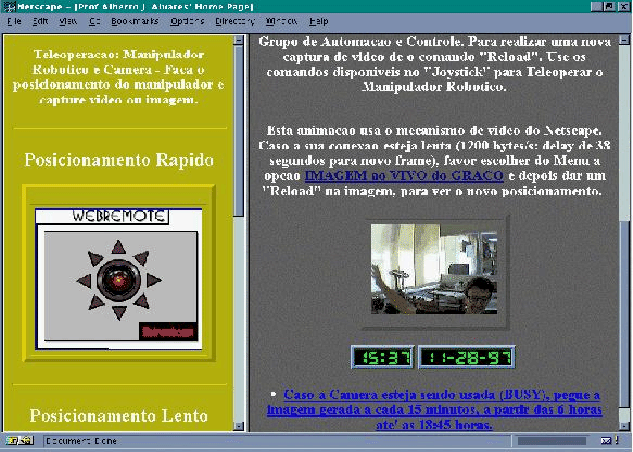
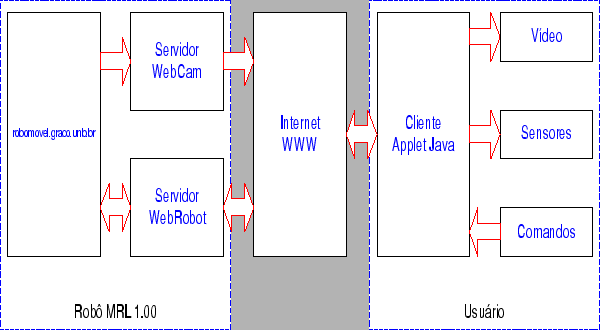
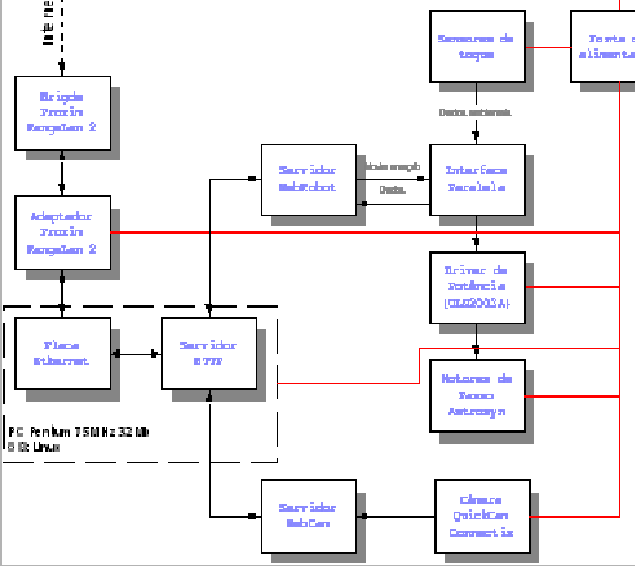
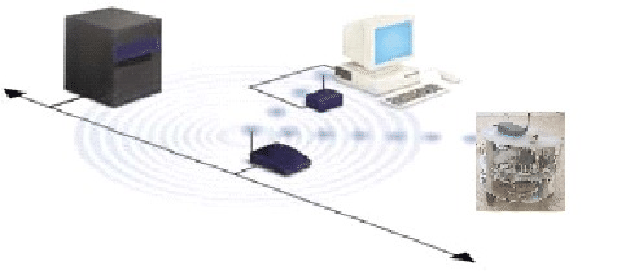
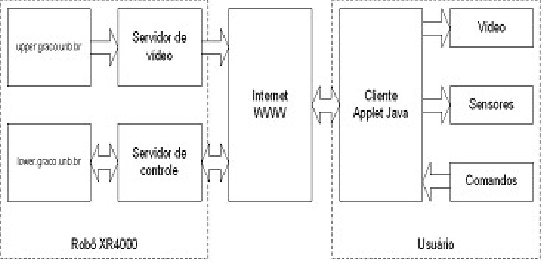
O Servidor HTTP (WWW) deve, preferencialmente, ser baseado em plataforma Unix o que possibilita maior robustez, flexibilidade, modularidade e até mesmo a necessidade de máquinas com menor capacidade de processamento, quando comparado ao ambiente Windows NT. O Sistema Ope-racional Linux em plataforma PC (Personal Computer) é uma opção extremamente atraente satis-fazendo todos os requisitos das aplicações de teleserviços para teleoperação de Robôs e máquinas de comando numérico. Neste contexto, o Servidor HTTP deve disponibilizar dois tipos de serviços básicos, que estão respresentados na figura 4.6 através de dois módulos:
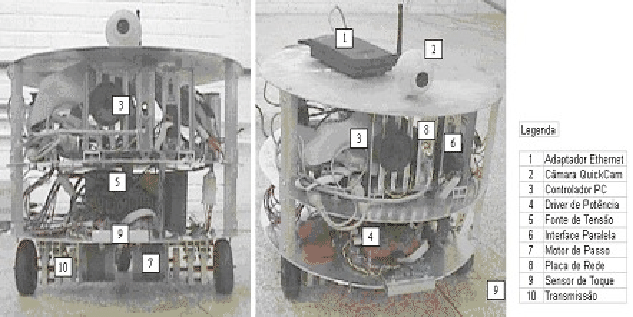
Este módulo é responsável pela captura de imagens através de câmeras CCD (Charge Coupled Device) utilizando-se da tecnologia WebCam (ÁLVARES & ROMARIZ, 1998) ou WebVideo (WOLF & FROITZHEIM, 1997). Imagens estáticas podem ser adquiridas em vários formatos como GIF (Graphics Interchaning Format) e JPEG (Joint Photographic Experts Group). O formato preferido devido à compressão de dados obtida é o JPEG. Imagens dinâmicas, no formato de vídeo digital, podem ser utilizadas com ou sem compressão de dados. Entre os padrões utilizados têm-se o MPEG (Moving Picture Experts Group), UYVY, RealVideo, M-JPEG (seqüência de imagens JPEG), CellB (Cell) e CuSee-Me, entre outros (SUN, 1994) e (CONNECTIX, 1996).
O sistema de vídeo (placa de captura mais software) deve capturar, digitalizar e comprimir um sinal de vídeo NTSC ou PAL não modularizado (composto ou S-Vídeo). O vídeo comprimido pode então ser armazenado em disco e/ou transmitido via rede para o cliente em um determinado padrão de compressão.
No caso de se utilizar seqüência de imagens JPEG, a taxa de compressão é muito baixa quando comparada com a MPEG ou RealVideo. A principal vantagem é que se pode enviar as imagens de vídeo utilizando o mecanismo server-push do Servidor HTTP diretamente para o cliente WWW, como o Netscape, sem a necessidade de se utilizar um software especial ou um plug-in para receber o formato de vídeo (OTSUKA, 1996). Para utilizar a compressão é necessário um software específico (plug-in) que deverá ser instalado pelo cliente e ajustado ao ambiente para receber imagens no formato especificado, normalmente, MPEG ou RealVideo (MELCHIORS, 1996). Com relação ao hardware para captura de imagens pode-se utilizar: câmeras de vídeo (NTSC ou PAL) conectadas a uma placa para frame grabber (SUN, 1994); ou câmeras com placa para captura de imagens com CCD utilizando a interface paralela ou USB (Universal Serial Bus) como entrada de vídeo para o micro-computador, como no caso da QuickCam (CONNECTIX, 1996). A grande desvantagem da utilização deste hardware esta associada a menor qualidade e a baixa velocidade de captura de imagens obtida, devido às restrições de velocidade da interface paralela e USB.
A fim de teleoperar o sistema Robótico é necessário que o mesmo tenha como pré-requisito alguma capacidade de comunicação remota utilizando um protocolo de comunicação aberto através de uma interface serial, paralela ou mesmo de uma Ethernet, permitindo a conexão a um Microcomputador ou a uma Workstation. Utilizando-se desta capacidade é possível que qualquer equipamento industrial possa ser teleoperado via Internet. A partir desta abordagem, disponibiliza-se um Servidor Robótico, denominado WebRobot, conectado ao equipamento industrial através da interface de comunicação do equipamento. Este servidor pode ser um servidor HTTP, de forma similar ao descrito para o WebCam (figura 4.6). O mecanismo de acesso às funções do objeto teleoperado é também baseado em programas CGI e HTML. Para cada função disponibilizada pelo protocolo de comunicação do Robô existe um programa CGI que é acessado no servidor WebRobot pelo cliente utilizando um browser WWW. Pode-se utilizar o mesmo equipamento para disponibilizar os dois serviços: WebCam e WebRobot.
Por outro lado, pode-se também utilizar dois ou mais servidores para realizar as funções de WebCam e WebRobot. Uma segunda abordagem é utilizar um único Servidor WWW conectado a um ou mais PC servidores via sockets TCP/IP. Estes PC servidores não são necessariamente servidores WWW. São servidores específicos para controle do Robô e para captura de imagem, sendo que todo o tratamento das informações obtidas é realizado pelo Servidor WWW, concentrando todas as ações. A figura 4.7 apresenta esta abordagem.
Nesta configuração todas as informações solicitadas passam pelo Servidor WWW que estabelece a comunicação via Rede Local de Comunicação (Intranet) através de sockets TCP/IP utilizando-se de programas CGI ou mesmo de servidores específicos.
A Rede de Comunicação Internet apresenta uma largura de banda heterogênea e com taxas de transmissão não determinísticas que podem variar de 10 kbps (ligação discada) a mais de 100 Mbps em rede local (Fast Ethernet), dependendo da conexão Internet e do tráfego. Tendo limi-tação de largura de banda, aplicações em tempo real para captura de vídeo apresentam sérias restrições. Para vencer estas restrições é necessário utilizar compressão de dados e conexão de grande velocidade à Internet. Taxas típicas de transmissão de vídeo com compressão necessitam de 20 Kbps (RealVideo), e sem compressão, de 100 Kbps (seqüência de imagens JPEG) com 5 quadros/s (MELCHIORS,1996). Outra limitação é o delay (atraso) inerente ao protocolo TCP/IP, o que não é desejável para aplicações em tempo real. Esta restrição pode ser resolvida adicionando algum grau de autonomia para a aplicação, no caso um Robô, de tal forma a contornar situações de emergência, bem como, situações perigosas. Recomenda-se, sempre que possível, que o sistema de teleoperação seja concebido para trabalhar em uma arquitetura baseado no controle supervisório, ou seja, as ações de controle são executadas localmente. Assim este nível de autonomia é obtido localmente no Servidor WebRobot, que deve monitorar estas condições limites (HIRZINGER et al. , 1997). Apesar dos datagramas com informações de controle enviados para o Robô pelo cliente via Protocolo TCP/IP serem pequenos, da ordem de 2 a 3 Kbytes, o Protocolo TCP não garante aplicações em tempo real. Uma alternativa para o futuro é utilizar o Protocolo RTP (Real-Time Transport Protocol) para aplicações em tempo real (OTSUKA, 1996).
A interface gráfica com o usuário (GUI - Graphical User Interface) deve ser baseada nas linguagens de programação HTML, JAVAScript e JAVA (OTSUKA, 1996). A utilização de JAVA permite uma independência de arquitetura de hardware, pois o applet escrito em JAVA (aplicação JAVA) pode ser executado em qualquer plataforma com um browser WWW que tenha suporte para esta linguagem. O programa em JAVA/HTML permite que o cliente tenha uma interface amigável com o sistema de teleoperação aceitando comandos e disparando os programas CGI necessários para executar as funções disponibilizadas e apresentando as informações necessárias para o usuário que são recebidas pelo servidor (figuras 4.8 e 4.9).
A realimentação visual é feita através do Servidor WebCam, que do lado do cliente apresenta uma interface amigável que recebe as imagens em formato comprimido (MPEG ou RealVideo) ou em uma seqüência de imagens JPEG. As figuras 4.8 e 4.9 apresentam alguns exemplos de interfaces com usuários, que foram desenvolvidas em projetos de teleoperação executados no GRACO (Grupo de Automação e Controle) da Universidade de Brasília. A figura 4.8 apresenta a interface do sistema RobWebLink (http://webrobot.graco.unb.br) e a figura 4.9 do sistema RobWebCam (http://www.graco.unb.br/robwebcam). Outra abordagem é a utilização de VRML (Virtual Reality Modeling Language). VRML é uma linguagem de descrição de simulações interativas com vários participantes se comunicando através da Internet (OTSUKA, 1996). O objetivo do desenvolvimento desta linguagem é torna-la um padrão para a descrição de simulações interativas no WWW, assim como a linguagem HTML é o padrão para descrição de páginas Web. Sua principal característica para aplicações de TeleRobótica está associada a capacidade de operar em conexões com pequena largura de banda, o que a torna uma candidata em potencial para ser utilizada
São apresentadas quatro aplicações desenvolvidas pelo doutorando utilizando esta metodologia: RobWebCam (figura 4.9) e RobWebLink (figura 4.8), Robô Móvel MRL 1.0 e a teleoperação do robô Nomad XR4000, o que possibilitou a validação da metodologia.
O Sistema RobWebCam é constituído por um manipulador com 2 DOF (Degree-of-Freedom), que suporta uma câmera de vídeo, sendo acionado por motores de passo. Estes motores são controlados através de uma placa de circuito impresso, que contém o driver de potência e o módulo de alimentação elétrica do equipamento. A placa comunica-se com o servidor do manipulador (WebRobot) através da interface paralela. Este servidor, WebRobot, contém os programas de controle. A câmera (SunVideo) possui alimentação própria de energia e é interligada ao servidor WebCam através de um cabo de sinal de vídeo conectado na placa de captura de vídeo do Servidor. No Servidor WebCam estão alocados o driver (programa em CGI) para receber as imagens e as páginas WWW utilizadas para teleoperar o sistema. O cliente, via browser (figura 4.9), recebe as imagens e os comandos deste servidor via Internet. Esta arquitetura é minuciosamente descrita em ÁLVARES & ROMARIZ (1998). O sistema pode ser acessado através do endereço http://www.graco.unb.br/robwebcam.
Este sistema permite o controle remoto do Robô Industrial com seis graus de liberdade IRB 2000 da Asea Brown Boveri (ABB) utilizando a Internet como via de controle. O controlador do Robô ABB IRB 2000 tem incorporado um sistema de controle remoto através da interface serial RS-232 baseado em 42 funções, que se utilizam de um protocolo de comunicação proprietário. A partir desta capacidade de comunicação remota, desenvolveu-se um servidor WWW (WebRobot) conectado ao robô via interface serial, disponibilizando o controle remoto do robô, através das 42 funções, em rede de comunicação utilizando o protocolo TCP/IP. A operação de controle remoto é monitorada através de captura de imagem em tempo real, utilizando o sistema RobWebCam (Servidor WebCam), além de informações e status do Robô enviadas pelo seu controlador. O sistema de teleoperação desenvolvido está disponível no endereço http://webrobot.graco.unb.br e pode ser operado remotamente permitindo a comunicação entre o servidor WWW e o Controlador do Robô.
A velocidade de transmissão de dados requerida para os serviços disponibilizados referentes aos comandos das funções do Robô é baixa, não comprometendo o sistema de teleoperação, apesar da latência inerente à Internet. Entretanto, esta latência faz com que a realimentação gráfica, através de vídeo on-line, seja viável quando se utiliza de velocidades de transmissão acima de 64 Kbps. Recomenda-se também a utilização de compressão de dados. O sistema está em operação desde maio de 1998. Só é permitido acesso a clientes devidamente cadastrados. Assim, o Servidor WebRobot solicita senha e password ao usuário do sistema, por questões de segurança (usuário devidamente cadastrado), bem como, devido à resposta do Robô e do Servidor WWW que pode ser degradada em função de atrasos de comunicação entre o servidor WWW e o cliente.
Entretanto serviços que necessitam de uma pequena largura de banda, como inicialização do Robô, iniciar programa, ligar e desligar Robô, dowload e upload de programas, entre outros, são plenamente satisfeitos. A evolução do sistema é prevista aplicando a mesma metodologia para controlar via Internet uma Célula Flexível de Soldagem.
Este sistema é um Robô Móvel Autônomo controlado remotamente via Internet utilizando o sistema operacional Linux como plataforma de controle e comunicação. A locomoção é realizada através de motores de passo, controlados por um driver de potência e programas em linguagem C. A estrutura do robô foi fabricada em alumínio, consistindo em um chassi com três níveis: o primeiro contendo motores e alimentação elétrica (baterias ou alimentação elétrica externa). O segundo abrigando uma placa mãe Pentium (responsável pelo controle do sistema) e uma placa de Rede Ethernet. O terceiro nível é constituído por um link de comunicação via rádio/Internet (Adaptador Ethernet) e uma câmera CCD (Charge Coupled Device). O controle via Internet é realizado através de uma interface Java/CGI (Common Gateway Interface) que envia os comandos do usuário para o sistema de navegação do robô (via rádio) tendo uma realimentação visual através de um sistema de captura de vídeo baseado em uma WebCam.
Este sistema permite a navegação do robô móvel XR4000 da Nomadic via Internet . O sistema de teleoperação utiliza como ferramenta de comunicação de dados a linguagem de programação Java, apresentando ao usuário imagens obtidas do ambiente remoto assim como dados sensoriais do robô, permitindo o controle de movimentos do robô e da câmera embarcada no sistema. Devido às restrições de velocidade de comunicação as imagens capturadas são comprimidas no formato JPEG, permitindo assim um menor consumo de banda de comunicação e melhorando a apresentação das imagens ao usuário. A necessidade de um sistema seguro de controle do robô e devido aos atrasos inerentes à comunicação via Internet levaram à utilização de um sistema de controle de velocidade do robô baseado na lógica fuzzy. Este controlador é responsável pela segurança do sistema, através do monitoramento dos dados sensoriais do ambiente e do controle da velocidade do robô. Testes realizados com o sistema validaram a metodologia de teleoperação desenvolvida.
O controlador do Robô ABB IRB 2000 tem incorporado um sistema de controle remoto através da interface serial RS-232 baseado em 42 funções. O sistema utiliza-se desta capacidade de comunicação remota interligando o sistema, em rede local de comunicação, utilizando o protocolo TCP/IP (Transport Control Protocol/Internet Protocol). O sistema concebido é baseado na arquitetura cliente/servidor, tendo como servidor uma plataforma UNIX (Linux) que disponibiliza o serviço WWW, que será acessado pelo cliente utilizando um browser (Netscape ou Explorer). O servidor WWW conectado ao Robô via interface serial disponibiliza as funções de controle. A teleoperação é monitorada através da captura de imagem em tempo real e informações/status do Robô são enviadas pelo seu controlador.
Sistemas teleoperados remotamente necessitam de dados e/ou imagens do objeto de controle, bem como, da transmissão de comandos através de um link de comunicação, que neste caso é baseado em conexão via Rede de Comunicação (SCHILLING et al. , 1997), através do Protocolo Internet (IP). A figura 4.10 apresenta a arquitetura do sistema, onde o Servidor Unix HTTP (Hypertext Transfer Protocol) disponibiliza dois tipos de serviços básicos, que estão representados na figura 4.1 através de dois módulos: WebCam e WebRobot, já descritos anteriormente.
É utilizado o sistema RobWebCam desenvolvido no GRACO em 1997 (ÁLVARES & ROMARIZ, 1998) como servidor WebCam. O sistema de vídeo é baseado na SunVideo (SUN, 1994) que possibilita a captura, digitalização e compressão em formato JPEG (Joint Photographic Experts Group) de um sinal de vídeo NTSC ou PAL não modularizado (composto ou S-Vídeo). Assim, utilizou-se a plataforma Solaris como WebCam. Cabe destacar que o sistema RobWebCam tem um manipulador (Pan-tilt) que pode posicionar a câmera para possibilitar uma melhor monitoração do ambiente (ÁLVARES & ROMARIZ, 1998). Utiliza-se uma seqüência de imagens JPEG, cuja principal vantagem está associada no envio de imagens de vídeo utilizando o mecanismo server-push do Servidor HTTP diretamente para o cliente WWW, como o Netscape, sem a necessidade de se utilizar um software especial ou um plug-in para receber o formato de vídeo (OTSUKA, 1996).
O driver WebCam utilizado pode ser obtido no endereço: http://lrcwww.epfl.ch/ oechslin/ wc_download.html. O WebCam possui um modo de operação que permite a renovação periódica da imagem de maneira que o cliente possa visualizar a última imagem atualizada. Este driver é um aplicativo escrito em linguagem C para plataforma Solaris que pode ser utilizado como um programa CGI (Commom Gateway Interface) a partir do servidor HTTP. Este pode reproduzir desde imagens JPEG simples até seqüências de imagens JPEG formatadas em mensagens MIME de múltiplas partes.
A fim de teleoperar o Robô utiliza-se o protocolo de comunicação ADLP-10 da ABB através de uma interface de comunicação serial conectado ao Servidor HTTP - WebRobot. O servidor WebRobot é implementado no sistema operacional Linux. O mecanismo de acesso às funções do objeto teleoperado é também baseado em programas CGI e HTML (Hypertext Markup Language). Para cada função disponibilizada pelo protocolo de comunicação do Robô existe um programa CGI que é acessado no servidor WebRobot pelo cliente utilizando-se de um browser WWW.
A partir da arquitetura definida para o sistema implementou-se o ambiente de teleoperação em uma plataforma multiusuário utilizando os Sistemas Operacional Linux e Solaris, desenvolvendo-se três sub-sistemas de interface com o usuário (fig. 4.11):
A utilização do protocolo TCP/IP, Internet/Intranet (ECKEL & HARE, 1995), para a comunicação entre o cliente e o servidor é bastante atrativa devido a sua presença no mundo inteiro, através da Internet. Há alguns problemas quando se utiliza o protocolo TCP/IP, pois a aplicação pode sofrer atrasos (delays) não apresentando um tempo determinístico de acesso, o que não é desejável para aplicações em tempo real. A utilização de servidor WWW apresenta uma interface rica e simples de ser utilizada. Os clientes/navegadores apresentam texto, gráficos, vídeo e áudio, permitindo uma comunicação multimídia entre cliente e servidor. O cliente acessa o servidor UNIX via WWW, e de maneira interativa define as tarefas a serem executadas pelo Robô, que retornará uma confirmação ou negação da execução para o cliente, bem como, uma imagem em tempo real do ambiente onde se encontra o Robô.
O Robô ABB IRB 2000 dispõe de uma porta serial para a comunicação com um computador pessoal (Computer Link) através do protocolo ADLP-10 (ABB Data Link Protocol) (ABB ROBOTICS, 1993), utilizando comunicação assíncrona entre o servidor UNIX e o controlador do Robô, com palavras de oito bits, paridade e stop bit. A função básica do protocolo é estabelecer a comunicação, coordenando o envio e recebimento de dados, enviados em bloco. Cada bloco de dados é composto de um telegrama, que por sua vez é descrito pela biblioteca ARAP (ABB Robot Aplication Protocol). O procedimento de comunicação é somente aplicável ponto-a-ponto, ou seja a comunicação de duas unidades de equipamento onde uma é superior a outra (master/slave). A biblioteca ARAP é composta de 42 funções de troca de dados entre o Robô e o computador, des-crevendo a forma como os dados e respostas do Robô são enviados e códigos de erro que podem ocorrer em uma transmissão de dados.
Para garantir a segurança na execução das funções de comando, além das respostas enviadas pelo controlador do Robô, é necessário o monitoramento através da captura de imagens em tempo real. Outro fator importante para a segurança é verificar quais são os usuários que estão acessando o servidor e controla-lo por meio de senhas. O monitoramento por vídeo é feito por uma câmera (SUN, 1994) conectada a um servidor que envia as imagens via WWW. A realimentação gráfica é viável quando se utiliza de velocidades de transmissão acima de 64 Kbps.
O hardware utilizado para o sistema é composto pelo Robô ABB IRB 2000, pelos servidores WWW (Linux e Solaris) e pelo cliente que acessará os servidores que controlam a teleoperação do Robô, a captura de imagem e posicionamento da câmera que possibilita a realimentação visual. O modelo IRB 2000 da Asea Brown Boveri, é um manipulador industrial equipado com funções para soldagem a arco, com seis graus de liberdade, capacidade máxima de carga de 10 kg e sua linguagem de programação nativa é a ARLA. Os servidores UNIX são: um computador pessoal com o sistema operacional (OS) Linux e uma Workstation Sparc20 com OS Solaris 2.6.
O protocolo ADLP-10 é um procedimento para comunicação assíncrona entre duas estações com um sistema de hierarquia, transmissão assíncrona serial no modo half-duplex, possibilidade de início de transmissão por ambos os lados (superior e subordinado). O quadro de dados é composto por: palavra de 8 bits + 1 bit de paridade + 1 stop bit. A função básica do ADLP-10 é estabelecer a comunicação verificando o envio e recebimento de mensagens, que são divididas em blocos, garantindo a integridade dos dados transmitidos. A verificação da integridade é feita através da paridade e pela soma de checagem do bloco. Cada bloco de dados é composto de um telegrama, descrito pela biblioteca ARAP.
O protocolo de comunicação define alguns sinais que podem ser utilizados por qualquer uma das estações (computador ou Robô) para iniciar uma comunicação. Cada sinal tem uma função durante o processo de comunicação. Se os sinais não forem enviados de maneira correta a comunicação é interrompida. Para iniciar a comunicação a estação envia um ENQ (enquiry) dessa forma ela espera uma resposta da outra estação para verificar se ela está pronta para continuar o processo de comunicação. As respostas possíveis são: ACK (acknowledge) que a estação receptora responde quando está pronta para comunicar-se; WACK (wait and acknoeledge) indica que a estação receptora está funcionando mas não está pronta para a comunicação; RVI (reverse interrupt) indica que a estação deseja enviar a mensagem e não recebê-la; NAK (negative acknowledgement) indica que a estação receptora não reconhece a comunicação. Para o controle do telegrama existem outros sinais: DLE (Data Link Escape) indica quando inicia e quando termina o campo de dados do telegrama, STX (Start of text) verifica a paridade do envio de mensagens podendo ser par ou ímpar e EOT (End of Transmission) que finaliza a comunicação entre as estações.
A Biblioteca ARAP descreve 42 funções de troca de dados entre o Robô e o computador e a formatação dos telegramas de envio de dados e de recebimento, bem como, os códigos de erro respondidos pelo Robô. Um telegrama sempre consiste de um Cabeçalho e um Campo de Dados. Todos os dados enviados pelo telegrama são enviados na forma binária. O Cabeçalho sempre possui o mesmo número de bytes e é composto por campos que estão sempre na mesma posição. O campo de dados possui tamanho e conteúdo variável dependendo da função a ser executada. O cabeçalho contém informações a respeito do tamanho do telegrama e do tipo do telegrama. O código da função a ser executada, pode ser visualizada na estrutura do telegrama na figura 4.12. O Number of Bytes ou NOB determina o número de bytes pelos quais o telegrama é composto. Este ocupa dois bytes do cabeçalho. O Destination Adress determina quem será o a estação receptora do telegrama, utiliza-se normalmente 1 para o Robô e zero para o computador, esse byte (byte 2) é semelhante ao Source Adress que determina a estação que enviou o telegrama.
O Function Code especifica o número da função a ser executada. As funções foram divididas em três grupos de operações básicas: as funções de programa, as funções de leitura e as funções de escrita. Os valores para MLI (Message Lenght Indicator), RS (Response Status) e TT (Telegram Type) são alinhados e enviados como um único byte. O MLI refere-se ao comprimento do telegrama (se possui ou não uma continuação). O RS comunica se a resposta é ou não um código de erro. O TT indica se o telegrama é um comando, uma resposta ou uma mensagem espontânea enviada pelo Robô. O Function Suffix é específico para cada função dando opções para o uso daquela função.
As funções especificadas pela biblioteca ARAP foram divididas em três grupos, conforme apresentado na figura 4.13.
Através das funções de leitura são obtidos os dados de configuração e memória do Robô. Com as funções de escrita o usuário pode alterar as configurações. Com as funções de programa o usuário pode fazer uploads e downloads de programas, bem como executar programas que estejam na memória do Robô. Utilizou-se para o desenvolvimento do sistema as linguagens de programação C, HTML, CGI, JAVA e JAVASCRIPT (MONTEIRO et al. , 1997). O sistema de teleoperação desenvolvido está disponível em http://webrobot.graco.unb.br/. O cliente acessa a homepage com uma tela de comando dividida em frames correspondentes as funções, bem como às várias informações referentes ao Robô. Cada função possui uma página WWW correspondente, que descreve o funcionamento da função e pede para que o usuário defina os parâmetros da função. A leitura desses parâmetros é feita por um CGI, programado em C da GNU. A interface entre o servidor e o controlador do Robô estabelece a comunicação segundo o protocolo ADLP-10, enviando via RS232C os telegramas e recebendo suas respectivas respostas ou mensagens de erro, que são apresentadas no formato html e visualizadas na tela de comando.
O sistema implementado é baseado em uma arquitetura cliente/servidor em plataforma UNIX, utilizando o Linux, como servidor HTTP para a disponibilização do serviço WWW. Para o moni-toramento utiliza-se o sistema RobWebCam (ÁLVARES & ROMARIZ, 1998). A figura 4.14 apre-senta a estrutura do sistema. O cliente conecta-se ao Robô através do servidor Telerobótico (WebRobot). O cliente envia formulários WWW e recebe os telegramas de resposta do Robô. O servidor WebCam está conectado ao WebRobot fazendo a captura de vídeo e enviando comandos para a movimentação da câmera. O acesso ao sistema é permitido a partir de senhas.
Foi desenvolvida uma Interface com o usuário onde são controladas todas as funções (Figura 4.8). Através dos menus pode-se acessar os arquivos correspondentes as funções da biblioteca ARAP. Foi criado um arquivo HTML para cada função que pode ser executada pelo Robô, que aparece na tela de funções. Há um menu de opções que permite ativar a realimentação gráfica. A tela de status permite que o estado do Robô apareça na tela (posição, modo de operação e configurações principais). A tela de envio (caixa de envio) apresenta o telegrama a ser enviado, podendo ser corrigido ou editado antes do envio. A tela de recebimento mostra o campo de dados do telegrama recebido do Robô. A figura 4.8 apresenta a tela principal do Sistema RobWebLink, onde pode ser visualizado nos frames superiores os menus onde o usuário seleciona as funções. Na segunda linha de frames as três janelas são: a janela de status, a janela de realimentação gráfica e a janela de função. Na terceira linha estão as janelas de envio e recebimento de mensagens.
Utilizou-se os formulários eletrônicos do HTML para permitir o envio de parâmetros necessários em cada uma das diferentes funções. Cada função é tratada individualmente por um CGI, de forma modular
O sistema foi desenvolvido em C++ da GNU para Linux. Desenvolveu-se os programas para serem executados via WWW/HTTP por programas CGI, que implementam o protocolo ADLP/10. Desta forma cada uma das funções tem o seu programa correspondente. Cada programa CGI possui módulos que realizam as seguintes tarefas:
Foi utilizado o sistema RobWebCam (ÁLVARES & ROMARIZ, 1998) para monitoração visual da operação do sistema. O usuário pode acessar o menu de opções e movimentar a câmera através de um joystick virtual (figura 4.9). O ideal seria ter várias câmeras em várias posições diferentes para que o usuário escolhesse a melhor visão, detalhada e/ou global.
A arquitetura do sistema baseia-se no modelo cliente-servidor, que divide as atribuições do sistema em um servidor, representado pela página HTML (Hiper Text Markup Language) e programas CGI localizados no robô móvel; e o cliente, representado pelo applet Java, funcionando no browser do usuário. Entre o cliente e o servidor encontra-se a rede Internet, que permite a comunicação entre os módulos (figura 4.15). O servidor MRL é composto de dois módulos principais (ÁLVARES, 1999): WebCam e WebRobot.
O applet Java, carregado no browser do usuário no instante que o mesmo acessa a página HTML do sistema (http://robomovel.graco.unb.br), é responsável pelo envio de comandos de movimentação do robô, através de requisições à programas CGI-BIN, desenvolvidos em linguagem C, localizados no servidor. O servidor, além de processar os comandos CGI, é responsável pela captura de vídeo, WebCam, e o envio das imagens para o browser. Tem-se, assim, uma interação entre o usuário e o ambiente em que o robô se encontra.
A estrutura desenvolvida visa a modularização, sendo organizada em níveis (figura 4.16):
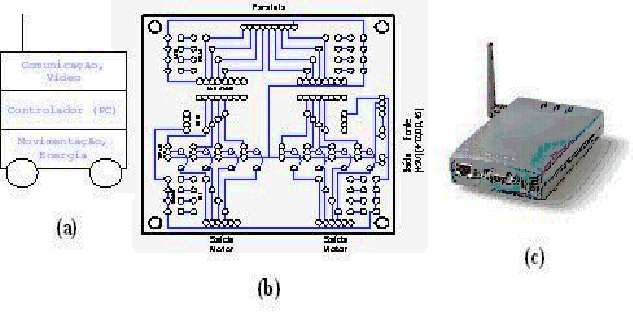
|
O sistema de locomoção é composto por um conjunto de motores de passo, que controlam os movimentos do robô através do deslocamento diferencial de duas rodas. Uma terceira roda de borracha é utilizada como apoio do conjunto. Os motores são alimentados através de um driver de potência, baseado no chip ULN 2003A (GADRE, 1998) e no transístor TIP 120. Este driver é controlado através da interface paralela do módulo controlador. A figura 4.16 mostra um esquema do circuito desenvolvido.
O controlador é representado por um computador pessoal tipo PC (Personal Computer) Pentium, funcionando sob o sistema operacional Linux e programado através da linguagem C. O sistema de comunicação utilizado (terceiro nível) baseia-se em um rádio adaptador Ethernet da Proxim (figura 4.17), que conecta-se a um bridge (RangeLan2 7510, Proxim) presente no laboratório, interligando o sistema à rede Internet. A utilização de um sistema de rádio para a comunicação com o robô deu-se devido aos seguintes fatores:
A figura 4.19 apresenta fotos do robô desenvolvido, onde podem ser observados os módulos.
A interface de teleoperação (GUI) desenvolvida é baseada na linguagem de programação Java, permitindo uma boa interação usuário-robô. São utilizados quatro botões que controlam a translação e a rotação do robô, no plano XY, e um quinto botão responsável pela implementação do algoritmo de navegação autônoma.
A figura 4.20(a) apresenta a página de entrada do sistema na Internet. Na figura 4.20(b) pode ser vista a interface desenvolvida. Na parte superior do console encontra-se a imagem recebida pela câmera localizada no robô, o que possibilita a visualização do ambiente remoto. A parte inferior do console é responsável pelo controle posicional do robô. Destaca-se nesta parte o botão Walk, responsável pela navegação autônoma do sistema.
Assim, se o usuário deseja que o robô caminhe 3 metros adiante, evitando possíveis obstáculos, deve ajustar a distância D para 3000 mm, ativar o sistema autônomo através do checklist Auto, e enviar o comando através do botão Walk. O robô tentará então, utilizando seus sensores de toque, navegar de forma autônoma até o ponto final desejado, a 3 metros a frente. Ainda na parte inferior são localizados dois botões, Help e Configure, responsáveis, respectivamente, pela abertura de uma janela de ajuda ao usuário, contendo instruções sobre o funcionamento do sistema; e pela configuração de aspectos relativos à recepção da imagem, como luminosidade e qualidade, permitindo assim uma melhor interação usuário-ambiente remoto.
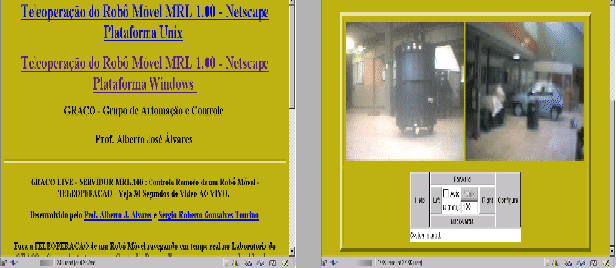
|
A aplicação de sistemas robóticos de teleoperação implica a utilização de um sistema em tempo real. Entretanto, o ambiente WWW e o protocolo TCP/IP não são adequados para aplicações em tempo real, devido à sua limitação de largura de banda (para transmissão de vídeo) e o delay (atraso) do envio dos pacotes TCP/IP entre servidor e cliente. Parte desses problemas podem ser reduzidos através do uso de imagens JPG (compactadas) e a implementação de um certo grau de autonomia no robô (sensoriamento e navegação autônoma), inseridos no sistema desenvolvido.
A utilização do Linux como sistema operacional foi guiada pela capacidade deste de prover serviços gerais (como conexão Internet, HTTP) assim como permitir, através da linguagem C, controle sobre dispositivos como sensores e motores. A sua robustez e confiabilidade, quando comparados a outros sistemas operacionais, tornam-no adequado à aplicações em robótica.
A necessidade de aplicação em tempo real, internamente ao robô, para gerenciar simultaneamente captura de vídeo e navegação, foi implementada através da definição de prioridades para os processos: assim, o processo responsável pela navegação é disparado com maior prioridade que os demais processos, garantindo a segurança do sistema, embora reduzindo a transmissão das imagens capturadas. Uma outra abordagem possível para o problema seria a utilização da extensão de tempo real para o Linux (RTLINUX, 1999), o que permitiria uma melhor aplicação do sistema ao controle do robô.
O algoritmo de navegação implementado foi simulado através do software MatLab, sendo realizados testes em diversas configurações de obstáculos, com a simulação de um sistema de sensores de toque. Verificou-se uma boa estabilidade do método, embora em alguns casos o sistema demore a convergir. A futura substituição dos sensores de toque para sensores do tipo sonar no robô é compatível com o algoritmo implementado, já tendo sido inclusive realizados testes do mesmo nessa nova configuração.
A arquitetura do sistema baseia-se no modelo cliente-servidor, que divide as atribuições do sistema em um servidor, representado pela página HTML (Hiper Text Markup Language) e programas em linguagem C localizados no robô móvel XR4000 (figura 4.21); e o cliente, representado por applets Java, funcionando no browser do usuário. Como pode ser observado na figura 4.22, o robô XR4000 possui dois computadores embarcados, um responsável pelo controle de movimentos do sistema (servidor de controle) e um responsável pela captura e processamento das imagens de uma câmera CCD (servidor de vídeo).
O robô móvel XR4000, produzido pela Nomadic Technologies, é um sistema avançado de robótica móvel, compreendendo sistemas de controle, sensores, comunicação e programação necessários para pesquisa e desenvolvimento na área de manipulação robótica, visão computacional, navegação por sensores e aprendizado.
Os servidores desenvolvidos no sistema de teleoperação do robô utilizam o servidor ``inetd'' como gerenciador das conexões Internet, diferentemente dos servidores CGI utilizados nos projetos de teleoperação do laboratório do Graco descritos nas seções anteriores. O servidor de controle é composto por três serviços em linguagem C, localizados na máquina ``lower'' (http://lower.graco.unb.br):
Aplicações de teleoperação necessitam de uma certa autonomia para se garantir a segurança do sistema, visto que o tempo entre o envio de um comando e o recebimento das imagens ou dados sensoriais pode ser da ordem de segundos. Este sistema utiliza-se da lógica fuzzy como forma de controle de velocidade do robô móvel, baseando a velocidade de saída na distância a ser percorrida (definida pelo usuário) e na distância dos obstáculos presentes no ambiente (aleatórios e transientes). Foram utilizados duas variáveis de entrada: distância a ser percorrida, definida em 5 conjuntos fuzzy; e a distância dos obstáculos (obtida através de sensores ultrasônicos), definida em 5 conjuntos fuzzy. Utilizando-se o método de desfuzzyficação do centróide e de regras do tipo "se a distância é longe e o obstáculo é médio então a velocidade é média", obteve-se a superfície de resposta do controlador mostrada na figura 4.23.
A interface de controle do sistema é baseada na linguagem de programação Java, atualmente a plataforma de desenvolvimento de software mais adequada para aplicações na Internet. O sistema desenvolvido consiste em dois applets, ou seja, programas carregados pelo browser que funcionam na máquina remota do cliente. Esses applets conectam-se com os servidores localizados no robô móvel, permitindo assim o envio e recebimento de dados entre o usuário e o robô.
O applet de controle do pan-tilt é responsável pelo posicionamento da câmera de vídeo do robô, possibilitando uma visualização do ambiente no qual o robô se encontra, seja na direção de seu movimento como em outras direções. O applet de controle de movimentos é responsável pela interface entre o usuário e os servidores robserver, sensenver e stopserver localizados no robô. Com base nesta interface, o cliente é capaz de posicionar o robô no plano, realizar ajustes de deslocamento linear e angular assim como receber dados sensoriais e o estado geral das baterias do robô. A recepção das imagens animadas pelo servidor é responsabilidade do navegador Netscape. Durante o funcionamento do sistema o usuário inicialmente visualiza a animação gerada pelo sistema, sendo capaz de movimentar e explorar o ambiente remoto através dessas imagens.
Caso seja necessário, o usuário pode realizar um ``zoom'' da imagem pressionando o mouse sobre a animação, sendo então mostrada uma imagem estática ampliada do servidor de imagens do robô (servidor JPGStd). A figura 4.24 apresenta a página Web de teleoperação do sistema. Na parte superior direita encontra-se o applet de controle do pan-tilt. Na parte inferior direita encontra-se o applet de controle de movimentos. Na parte superior esquerda apresenta-se as imagens capturadas pelo robô (animação JPEG) e na inferior esquerda apresenta-se imagens do laboratório através de uma câmera externa ao robô.
A tecnologia de teleoperação via Internet encontra-se em seu estágio inicial de desenvolvimento, tendo sua aplicabilidade ainda reduzida devido à baixa velocidade de transmissão de dados da atualidade. Este sistema de teleoperação utiliza como ferramenta de comunicação de dados a linguagem de programação Java, atualmente a plataforma mais adequada ao desenvolvimento de aplicações na Internet. O sistema apresenta ao usuário imagens obtidas do ambiente remoto assim como dados sensoriais do robô, e permite ao mesmo o controle de movimentos do robô e da câmera embarcada no sistema. Devido às restrições de velocidade de comunicação as imagens capturadas são comprimidas no formato JPEG, permitindo assim um menor consumo de banda de comunicação e melhorando a apresentação das imagens ao usuário. A necessidade de um sistema seguro de controle do robô e devido aos atrasos inerentes à comunicação via Internet levaram à utilização de um sistema de controle de velocidade do robô baseado na lógica fuzzy. Este controlador é responsável pela segurança do sistema, através do monitoramento dos dados sensoriais do ambiente e do controle da velocidade do robô. Foi verificado, através de experimentos, que o controlador fuzzy é sensível aos dados obtidos através dos sensores ultrasônicos do robô, o que leva à necessidade de se desenvolver uma espécie de filtro de dados sensoriais para obter uma maior estabilidade e confiabilidade no sistema de controle de velocidade. A utilização do sistema teleoperado em ambientes conhecidos também requer o posterior desenvolvimento de um sistema autônomo de navegação, o que simplificaria a teleoperação do robô móvel XR4000 em ambientes estruturados.
Manufatura Auxiliada por Computador é o estágio final do auxílio do computador na produção de peças mecânicas. Dessa forma, em referências mais antigas (pré-década de 90), CAM se encontra definido como o uso de sistemas de computação para planejar, gerenciar e controlar as operações de uma planta, através de interface computadorizada direta ou indireta com a produção (GROOVER, 1985). Dentro dessa definição, Groover dividiu o CAM em duas grandes categorias:
Além das aplicações envolvendo uma interface direta computador-processo com o propósito de controle ou monitoramento do processo, a Manufatura Auxiliada por Computador também inclui aplicações indiretas nas quais o computador faz um papel de ajudante nas operações de manufatura da planta. Nessas aplicações o computador é usado fora da linha para prover planos, cronogramas, previsões, instruções e informações através das quais os recursos produtivos da empresa podem ser gerenciados mais efetivamente. Alguns exemplos de CAM para suporte à manufatura são:
CAM sempre foi relacionado ao controle da manufatura como um todo. No entanto, atualmente, as ferramentas de software consideradas para CAM são aquelas ligadas unicamente à geração de programas para máquinas CN. Aparentemente, o nome CAM ficou associado a esse tipo de aplicação, já que esta, dentre as aplicações que se incluem sob o nome de CAM, foi a que se desenvolveu primeiro. As outras aplicações, ao se desenvolverem posteriormente, com o aumento generalizado do uso de computadores, ganharam depois nomes próprios, como CAPP (Planejamento do Processos Auxiliado por Computador) e CAPPC ou CAP (Planejamento e Controle da Produção Auxiliado por Computador, que inclui MRP, controle de chão-de-fábrica, etc).
O software de CAM tem uma íntima relação com o CAD e na maioria das vezes importando modelos de produto a partir deste. Além disso, o software deve transmitir seus dados corretamente para a máquina-ferramenta, para que a usinagem seja realizada a contento. Assim a integração do CAM ao ambiente se dá nessas duas frentes: a comunicação CAD-CAM e a comunicação CAM-máquina-ferramenta.
O capítulo situa-se na área de teleoperação apresentando uma metodologia para o desenvolvimento de sistemas Robóticos teleoperados via Internet e situando a teleoperação na fase de execução do CAM. A metodologia foi testada através do desenvolvimento de cinco sistemas que estão disponíveis em http://www.graco.unb.br.
O sistema RobWebCam foi validado comprovando a sua funcionalidade estando em operação desde setembro de 1997. Foram observadas algumas possibilidades de otimizações, decorrentes das análises feitas, para evolução do sistema (ÁLVARES & ROMARIZ, 1998). O manipulador cons-truído apresenta baixo ruído nos deslocamentos realizados e possui dimensões reduzidas quando comparado a outros sistemas de posicionamento de câmera existentes no mercado. Além disso, os custos foram bastante reduzidos. Como áreas de aplicação características do sistema têm-se: vigilância de estabelecimentos, visualização de ambientes de trabalho, visualização de ambientes comerciais para propaganda, visualização de ruas ou pontos turísticos, entre outras.
Um dos grandes empecilhos à tecnologia de teleoperação via Internet, atualmente, é o tempo de espera elevado em função da largura de banda existente na rede, ou seja, ainda é considerável o intervalo de tempo entre o envio do comando, a efetivação do posicionamento e a visualização da nova situação monitorada, o que compromete aplicações em tempo real que requerem maior confiabilidade e segurança, como no caso do sistema RobWebLink.
O sistema RobWeblink apresentou bons resultados no que concerne as funções diretamente relacionadas ao controle do Robô através do seu protocolo de comunicação, por requerer arquivos de 1 a 2 Kbytes de tamanho para implementar estas funções. Entretanto, a realimentação através de vídeo exige maior largura de banda para aplicações em tempo real. Uma opção seria a utilização de Realidade Virtual ao invés de se utilizar sinal de vídeo, através de VRML (OTSUKA, 1996).
O robô móvel desenvolvido mostrou-se adequado para a proposta de desenvolvimento de um sistema simples e barato de robótica móvel voltado para aplicações didáticas e de pesquisa. A sua tecnologia pode ser aplicada para utilizações diversas, como inspeção de sistemas industriais, ou mesmo aplicações em televigilância.
A utilização da Internet como meio de transmissão de dados para o robô (Nomad XR4000) mostra-se adequada, e permite que o sistema seja amplamente disponível para usuários, sem limitações geográficas. A tecnologia de TeleRobótica via Internet é ainda incipiente e está tendo um grande desenvolvimento em virtude dos grandes avanços obtidos na tecnologia de compressão de dados e no grande impulso que está se dando a tecnologia de WebTV e Vídeo Conferência e outras aplicações que dependem de uma maior largura de banda.
Certamente, estas tecnologias associadas a maior largura de banda da Internet irá viabilizar aplicações em tempo real no futuro, como menos restrições que se tem atualmente. Empresas como a National Instruments, fabricante do LabView (http://www.ni.com), desenvolvem sistemas de teleoperação e instrumentação remota via Internet para aplicação em Automação Industrial e certamente outras empresas seguirão este caminho. Segundo STEINEL (2001) empresas como a Volkswagem desenvolvem laboratórios remotos para testes de motores visando a diminuição de custos e compartilhamento de sua estrutura laboratorial entre a matriz na Alemanha e sua filial no México.
A integração entre as etapas do ciclo produtivo é um dos caminhos que devem ser explorados na busca pela redução de custos e tempos de produção. De acordo com SJAJ e MÄNTYLA (1995) a modelagem do produto é o ponto central para a promoção de tal integração. A abordagem baseada em features é um importante elemento no projeto e na manufatura auxiliada por computador. As features podem ser consideradas como um elemento de integração potencial entre o projeto e a manufatura.
Num sistema de produção integrado, o modelo do produto, definido no módulo de CAD, deve estar disponível para outros módulos (CAE, CAPP, CAM, CAQ, etc) para que estes possam realizar suas funções, assim como estes módulos devem ser capazes de enviar informações de volta para o módulo de CAD a fim de que alterações que sejam necessárias na peça possam ser efetuadas ainda na etapa de projeto (por problemas detectados na fabricação, por exemplo). A utilização de features como base de informação para a modelagem do produto é o caminho para se atingir esta integração (TÖNSHOFF et al, 1994). De acordo com SALOMONS et al. (1993) a tecnologia de features é o caminho mais adequado para se promover a integração entre as atividades de projeto, planejamento do processos, fabricação, inspeção, etc.
Neste capítulo é apresentada uma revisão bibliográfica sobre arquiteturas e sistemas CAD/CAPP/CAM cooperativos e correlatos, centrados em rede e distribuídos. Duas arquiteturas que se destacam são o Cybercut e o WebSpiff, ambas baseadas na tecnologia de features.
A Tecnologia da Informação, em especial, a tecnologia de redes de comunicação e Internet, está abrindo um novo domínio para construção dos futuros ambiente CAD/CAPP/CAM (LEE et al, 2001). Este é um novo paradigma para estes sistemas computacionais baseados em ambiente globa-lizados, centrados em rede e espacialmente distribuídos. Isto permitirá que os desenvolvedores de produtos, projetistas, tenham maior facilidade de comunicação possibilitando o compartilhamento e o projeto cooperativo durante o desenvolvimento do produto, bem como, a teleoperação e moni-toração dos dispositivos de manufatura. Com o crescimento da popularidade dos navegadores baseados no WWW está ficando mais evidente que o ambiente de projeto e manufatura orientado a rede se tornará um novo paradigma para o desenvolvimento de produto.
No chão-de-fábrica vários exemplos de arquiteturas para protocolos de camada de aplicação do Modelo ISO/OSI, Manufacturing Message Specifications (MMS), estão sendo desenvolvidos. Estas arquiteturas utilizam-se do protocolo TCP/IP, por apresentar menores custos de implementação e devido ao fato da maioria dos dispositivos de manufatura (CNC, PLC, Robôs, entre outros) não suportarem o MMS. Segundo CHEAH, LEE e LIM (1997) o TCP/IP é uma ótima alternativa para suportar o protocolo MMS como um padrão de fato em redes de computadores. Assim o CAM em sua fase de execução, também pode usufruir dos benefícios do TCP/IP.
A filosofia de aplicações CAD/CAM tradicionais é baseada no ambiente computacional desenvolvido na década de 70 e restrito à aplicações tipo "single-location" (KAO e LIN, 1996). A Tecnologia CAD/CAM foi concebida como uma aplicação "single-user" e um usuário CAD/CAM pode apenas se comunicar com a unidade de processamento central (CPU) do seu computador. Em sistemas CAD/CAM comerciais os usuários não podem se comunicar entre eles, mesmo que a CPU seja um sistema de tempo compartilhado como uma estação de trabalho Unix ou um mainframe. Com a popularização das Redes de Comunicação Local (LAN) sistemas CAD/CAM foram implementados em servidores de redes, permitindo que os usuários acessem de qualquer computador conectado a LAN o servidor. Contudo, a interação entre os usuários CAD/CAM ainda ocorre da mesma forma que antes, apesar da utilização dos modernos serviços de comunicação disponíveis como E-mail, fax, ftp, http, entre outras, que diminui o tempo gasto para comunicações.
Passadas mais de três décadas a tecnologia CAD/CAM tem tido um grande sucesso em aplicações industriais tendo como resultado um significativo aumento na produtividade e competitividade. A Engenharia Simultânea (CE) tem sido reconhecida como uma filosofia de manufatura capaz de possibilitar a concretização da Manufatura Integrada por Computador (CIM) que não pode alcançar todo seu potencial sem CAD/CAM. Já é uma realidade a Manufatura Global que aumenta de forma acentuada a implementação de empreendimentos multinacionais e multiregionais. Assim, é necessário a utilização de tecnologias CAD/CAM para facilitar a Engenharia Simultânea (CE) nas Empresas Integradas por Computador (CIE) em operações multiregionais ou multinacionais.
Histórias de sucesso sobre CE usualmente enfatizam a ligação entre muitas divisões na empresa para compartilhamento e troca de idéias e experiências. Este estilo de trabalho emprega uma equipe multifuncional, equipe virtual ou uma força tarefa multidisciplinar. Para que isto ocorra os engenheiros deverão trabalhar efetivamente como time/equipe, sendo este um fator crítico para o sucesso do desenvolvimento de produto de forma Simultânea (HARTLEY, 1992). O engenheiro de projeto define toda a geometria CAD, passando-a para a divisão de engenharia no estilo tradicional de trabalho over-the-fece ou over-the-wall. Por outro lado, com a equipe de projeto organizada como uma força tarefa (CE), o engenheiro de projeto e o desenhista podem sentar-se lado a lado e trabalhar juntos, se eles estiverem lotados no mesmo departamento. Isto resulta em um processo de desenvolvimento contínuo, melhor que um modelo seqüencial onde os projetos são passados de um lado para o outro. Portanto, em empresas que mantêm operações multiregionais ou multinacionais, uma necessidade por sistemas computacionais CAD/CAM cooperativos têm surgido, para facilitar o trabalho em equipe de forma fechada entre engenheiros localizados em diferentes regiões geográficas.
Um sistema CAD/CAM cooperativo deve prover aos projetistas, em duas ou mais localizações remotas, capacidade de trabalhar juntos sobre atividades de projeto comuns, o que significa que um novo ambiente de projeto terá de ser criado para se ter um uso total de todos os conhecimentos relevantes, tecnologias e recursos do mercado mundial. Para atingir esta tarefa desafiadora, tecnologias de rede e computadores devem ser usadas para acentuar a comunicação entre os projetistas. Por exemplo, multimídia, sistemas whiteboard 2D e 3D, browsers, www, ferramentas de aplicação compartilhada, etc, têm demonstrado serem de grande utilidade para acentuar as liga-ções entre projetistas geograficamente separados, mas ainda não são suficientes para o trabalho cooperativo.
Na prática de projeto de engenharia, cada vez mais as atividades associadas aos vários aspectos de manufatura estão sendo considerados durante a fase de projeto. Modelagem baseada em Featurestypeset@protect @@footnote SF@gobble@opt Tecnologia de Features já foi analisada na primeira disciplina de estudo dirigido cursada no terceiro período de 2001. Maiores informações podem ser consultadas através da URL ftp://omega.enm.unb.br/pub/doutorado/estudo_dirigido. tem sido considerado como um novo paradigma para integração das atividades de engenharia, desde o projeto até a manufatura. Assim o conceito de features tem sido usado em uma ampla gama de aplicações como projeto de peças e montagem, projeto para manufatura, planejamento de processo e inúmeras outras aplicações. Estas aplicações estão migrando para ambientes computacionais heterôgeneos e distribuídos para suportar o processo de projeto e manufatura que serão distribuídos tanto na dimensão espacial quanto temporal.
Nota-se que é indesejável e freqüentemente improvável requerer que todos os participantes nas atividades de projeto e manufatura de um produto usem o mesmo sistema de hardware e software. Então os componentes devem ser modular, e comunicar-se com os demais através de uma rede de comunicação para efetiva colaboração.
Muitos esforços de pesquisa têm sido empregado no desenvolvimento de ambientes de projeto orientados à redes de computadores, normalmente, denominados de centrados em rede. SHAH et al. (1997) desenvolveram uma arquitetura para padronização da comunicação entre o núcleo de um sistema de modelagem geométrica e as aplicações. HAN e REQUICHA (1998) propõem uma abordagem similar que possibilita o acesso transparente para diversos modeladores sólidos. WANG e WRIGHT (1998) descrevem um serviço de manufatura distribuído denominado de Cybercut (http://cybercut.berkeley.edu). Eles enfatizam como ferramentas de CAD são desenvolvidas para facilitar o projeto distribuído e o processo de fabricação.
HARDWICK et al. (1996) propõem uma infra-estrutura que permite a colaboração entre compa-nhias no projeto e manufatura de novos produtos. Esta arquitetura integra o WWW para compartilhamento de informações na Internet utilizando o padrão STEP para modelagem de produto. MARTINO et al. (1998) propõem uma abordagem para integrar as atividades de projetos com as demais atividades de manufatura e produção baseado na abordagem de modelagem baseada em feature integrada, que suporta Projeto por Features e Reconhecimento de Features. Entretanto estes trabalhos são conceituais em sua essência e não apresentam uma representação bem estruturada e nem algoritmos detalhados. Por exemplo, estes trabalhos não definem como distribuir o processamento computacional necessário entre os componentes distribuídos, e como modular a comunicação entre os componentes para minimizar o delay da rede. Se as ações de troca de dados entre as aplicações não puderem ser disparadas apropriadamente, isto acarretará em um problema crítico para a computação distribuída. Logo, é crucial o desenvolvimento de um sistema bem integrado, centrado em rede e com arquitetura baseado em agentes para projeto e manufatura distribuída e cooperativa.
LEE et al. (1999) apresentam a arquitetura de um sistema de modelagem baseada em features centrado em rede, em um ambiente de projeto distribuído, denominado de NetFeature System. Esta abordagem combina técnicas de modelagem baseada em features com tecnologia de comunicação e de computação distribuída para suportar atividades de modelagem de produto e projeto cooperativo em uma rede de computadores. A abordagem é implementada em uma arquitetura cliente/servidor, na qual os clientes realizam a modelagem baseada em features através da Web, o servidor cria o modelo de features neutras e outras aplicações se comunicação umas com as outras usando um protocolo de comunicação padrão para acessar os objetos remotos. O sistema foi concebido a fim de ter um bom balanceamento entre as funcionalidades disponíveis no lado do cliente e largura de banda disponível na Internet.
O processamento no lado do cliente é importante quando a aplicação é baseada na Web. Isto significa que o servidor dá ao cliente alguma responsabilidade pelo processamento dos dados, ou seja, o cliente deve ter mais funcionalidades do que simplesmente um Front-End desprovido de processamento local denominado como um de thin clients. Foi utilizado um protocolo de comunicação padronizado baseado em CORBA (Commom Object Request Broker Architecture).
De forma semelhante às atividade de modelagem de produto (CAD by features), planejamento de processo (CAPP) e a manufatura assistida por computador na fase de planejamento (CAM Planejamento) e na teleoperação (CAM Execução) necessita-se de um bom balanceamento entre largura de banda e funcionalidades do cliente, implementada na GUI.
Segundo BERG (1999 e 2000) ferramentas CAD com área de trabalho compartilhada (workspace-sharing tools) são aplicações que podem ser usadas como um programa stand-alone, mas que possuem facilidades para conectar-se com outras aplicações de modelagem, de maneira a estabelecer um ambiente de trabalho cooperativo. Podem também ser adicionados à aplicações existentes, para prover a funcionalidade necessária para um ambiente cooperativo. Algumas destas aplicações utilizam base de dados compartilhadas ou gerenciadores de sessões.
Sistemas cooperativos podem ser definidos como sistemas multi-usuários distribuídos sendo ao mesmo tempo concorrente e sincronizado (BIDARRA et al. , 2000). Concorrência envolve gerenciamento de diferentes processos que tentam simultaneamente acessar e manipular o mesmo dado. Sincronização envolve propagação, envolvendo dados entre usuários de uma aplicação distribuída, de forma a deixar seus dados consistentes.
Sistemas de modelagem cooperativa tipicamente tem uma arquitetura cliente/servidor, diferindo na distribuição de funcionalidade e de dados entre clientes e servidores. Um problema recorrente nos sistemas cliente/servidor está associado ao conflito entre a limitação da complexidade da aplicação cliente e a minimização do carregamento da rede. Em um contexto de modelagem coo-perativa, a complexidade do cliente é principalmente determinada pelas facilidades de modelagem e interatividade implementadas no cliente, enquanto que o carregamento da rede é determinado principalmente pelo tipo e tamanho do modelo de dados sendo transferido de/para os clientes.
Uma solução de compromisso pode ser concebida entre os dois extremos, os chamados thin clients e fat clients. Uma arquitetura pura thin client tipicamente coloca toda a funcionalidade no servidor, o qual envia uma imagem de sua interface de usuário para ser mostrada no cliente. Clicando na imagem é gerado um evento, contendo as coordenadas da tela de localização que o usuário clicou. Os eventos são enviados para o servidor, o qual associa com uma ação sobre um particular widgate. A seguir esta ação é processada e a imagem atualizada do resultado da ação do usuário é enviada de volta para o cliente onde é mostrada. Esta abordagem requer um fluxo de informação contínua entre o servidor e os clientes, sendo muito pesada em termos de tráfego de rede. Sistemas de gerenciamento de Terminal Remoto para conectividade entre sistemas Windows e/ou Unix utilizam esta abordagem, como Citrix (http://www.citrix.com) e XFree/XDM (http://www.X11.org)
O outro extremo, um puro fat client oferece total facilidade de interação e modelagem local, mantendo seu próprio modelo local. Comunicações com o servidor é então requerida quando houver necessidade de sincronizar as modificações de dados do modelo local com os outros clientes. Em ambiente cooperativo onde clientes podem concorrentemente modificar o modelo de dados local, a prevenção da inconsistências de dados entre diferentes clientes torna-se um problema crucial. Um exemplo prático desta arquitetura é o sistema de declaração de imposto de renda via Internet adotado no Brasil, onde toda a funcionalidade é colocada no cliente e quando a declaração está concluída é enviada para o servidor, estando disponível na base de dados da Receita Federal. A seguir são apresentadas algumas arquiteturas levantadas na revisão bibliográfica.
Feature M (STORK, 1998) é um sistema CAD 3D que suporta modelagem sólida baseada em features utilizando o ACIS-kernel e uma linguagem interpretada denominada de MCL+, que permite ao usuário a adição de funcionalidade. MCL+ também é utilizado para comunicação interna entre os módulos em FeatureM. O sistema usa a abordagem replicada, onde cada aplicação cliente tem um modelo local que é atualizado localmente e incrementado. Isto implica em clientes mais complexos e menos tráfego na rede.
Dois sistemas executando o sistema CAD FeatureM são conectados um com o outro pela rede, como mostra a figura 5.1.
O sistema Collaborative Industrial Design Environment (CollIDE) desenvolvido por NAM (1998a e 1998b) oferece uma área de trabalho 3D compartilhada para muitos usuários de uma aplicação stand-alone CAD. É concebido como um plug-in para um sistema Alias CAD 3D e disponibiliza áreas de trabalho para os usuários, chamado de estágios. Estágios são áreas de uma aplicação onde a modelagem real tem lugar. A arquitetura do CollIDE é apresentada na figura 5.2.
Tool Based Co-operation (TOBACO) foi desenvolvida por DIETRICH (1997). Fornece um componente integrado no topo de programas de projeto existentes para habilitá-los a participar na modelagem cooperativa. Isto possibilita a redução do tempo de desenvolvimento e melhora a quali-dade do projeto. TOBACO usa o padrão CORBA com IDL (Interface Definition Language), que define uma descrição formal dos serviços. TOBACO trabalho como um programa adicional para o programa de projeto que é familiar ao usuário. A GUI é definida usando wxWindows (SMART, 1999), uma ferramenta que possibilita código GUI independente de plataforma. A figura 5.3 mostra a estrutura de TOBACO.
O objetivo dos desenvolvedores (STORK, 1997) do ARCADE (Advanced Realism CAD Environment) foi criar um método de discussão aprimorado para ser usado sobre a Internet. O método permite que muitos usuários trabalhem juntos sobre uma projeto, interagindo um com o outro em tempo real. A figura 5.4 apresenta a arquitetura do sistema.
Em ambiente cooperativo todos os clientes devem ter o mesmo modelo geométrico. Quando um usuário altera o modelo, todos os clientes devem ser atualizados. Para que o processo tenha consistência as mensagens de atualização devem ser entregues na mesma ordem para todos os clientes. Este problema é caracterizado como uma questão de sincronização e consistência do modelo geométrico.
Um segundo problema está associado à concorrência e diversas soluções são adotadas nos sistemas descritos (BERG, 1999). O carregamento da rede, associado a largura de banda, ambiente computacional heterogêneo e problemas específicos de aplicações são também relacionados na análise feita por BERG (1999).
Sem dúvida a redução do carregamento da rede de comunicação é uma das principais metas para os desenvolvedores de sistema de modelagem distribuída e interativa, seguido da consistência e sincronização do modelo geométrico.
WebSpiff (BIDARRA et al. , 2000) é baseado em uma arquitetura cliente/servidor consistindo de muitos componentes (figura 5.5). No lado do servidor tem-se dois componentes principais:
O servidor coordena a sessão de colaboração, mantem um modelo de produto centralizado e provê todas as funcionalidades que não podem, ou não devem, ser implementados no cliente. Uma importante vantagem desta arquitetura é que existe apenas um modelo de produto centralizado, então envita-se inconsistências entre múltiplas versões do mesmo modelo.
A atual versão do sistema WebSpiff (servidor) oferece múltiplas visões sobre o modelo do produto. Cada visão consiste de um modelo de feature com features específicas para a aplicação correspondente à visão. São duas visões disponíveis: uma de projeto e uma outra para planejamento do processo, manufatura, de peças. Na visão de projeto, o modelo de features consiste de features aditivas (protusions) e features subtrativas (slots e furos). Na visão de planejamento de manufatura, o modelo de features consiste apenas de features subtrativas. Também, estão disponíveis funcionali-dades associadas a validação e manutenção de features. Finalmente são oferecidas sofisticadas técnicas de visualização de features.
Os clientes do WebSpiff usam web browser mais plug-ins para Java e Java 3D, a fim de ter capacidade de conectar-se ao portal WebSpiff, fazendo o carregamento de um Java applet, que implementa a GUI, fazendo a conexão com o Gerenciador de Sessão, disparando-o no lado do servidor. O usuário pode agora conectar-se a uma sessão cooperativa em andamento ou iniciar uma nova sessão.
Muitas das funcionalidades do sistema de modelagem SPIFF, baseado no kernel ACIS e na linguagem TCL/TK (JOHNSON, 1997), foram portados para o cliente. Dentre estes destacam-se câmeras windows, ou seja, janelas separadas na qual uma representação gráfica do modelo do produto é apresentada. Facilidades de visualização incluem a apresentação da imagem do modelo em 3D utilizando a API Java3D, realizando a renderização no servidor. A seguir é feita a apresentação das imagens renderizadas no formato ``jpeg'' no cliente. O servidor, também, gera o formato ``VRML'' sendo enviado para o cliente, onde é carregada utilizando Java3D cena .
O envio de um arquivo VRML para o cliente demanda pequena largura de banda, algo em torno de 100 kbytes para um modelo de feature de média complexidade. Os arquivos no formato jpeg são da ordem de 10 kbytes.
O sistema CSM (Collaborative Solid Modelling) é um sistema de modelagem cooperativa baseado na Web (CHAN, 1999) que usa muitos métodos de concorrência. É criado um ambiente multi-usuário onde um modelo compartilhado pode ser acessado e modificado por vários usuários em tempo real, sendo que cada usuário tem seu próprio modelo local. Novamente a abordagem replicada é usada neste sistema. A estrutura do sistema CSM é apresentada na figura 5.6. Quando muitos clientes distribuídos desejam iniciar uma sessão de modelagem, Java applets são iniciados nos browsers dos clientes conectados ao servidor CSM. Este servidor é usado para sincronizar os clientes. Mudanças realizadas por um dos clientes são primeiramente aplicadas à cópia local do modelo. Depois, as mudanças são enviadas para o servidor, que atualiza o modelo global no lado do servidor. Finalmente, as mudanças são enviadas para todos os outros clientes, que atualizam suas cópias locais.
NetFeature (LEE, 1999) é um sistema de modelagem baseado em features e na web. Diversos browsers distribuídos são os clientes que conectam-se ao servidor de modelo de feature neutro. O servidor NetFeature tem muitos componentes como mostrado na figura 5.7. O Modelo de Features Neutro comunica-se com um servidor de Base de Dados, que gerência todos os dados do modelo. O Modelo de Features Neutro mantém uma B-rep do modelo de feature usando atributos para armazenar informações como superfície de acabamento, tolerâncias dimensionais e de forma. Os atributos podem ser incorporadas a cada feature sólida, face, aresta e vértice do modelo R-rep. O Modelo de Feature Neutro é construído a partir do kernel de modelagem sólida ACIS. O Gerenciador de Agentetypeset@protect @@footnote SF@gobble@opt Sistemas Multi-Agentes (MAS) serão descritos no capítulo 7. Feature controla todos os agentes, onde cada agente é responsável por um cliente e fornece serviços para este cliente respondendo suas solicitações. O servidor fornece algumas funções básicas para o Modelo de Feature Neutra, incluindo a criação de entidades geométricas, operações Booleanas, entre outros.
Serão analisados alguns sistemas correlatos, assíncronos ou não concorrentes, sendo portanto não cooperativos segundo a definição adotada. Entretanto estes sistema utilizam-se de computação distribuída como ocorre com os sistema cooperativos.
WebCAD3D (WANG, 1998) é um sistema de manufatura ``rápido'' que faz uso do WWW como mecanismo de integração. O sistema tenta integrar os ambientes de projeto e manufatura distribuído, através do projeto criado em um cliente web e enviado para um servidor de manufatura sobre a Internet. No servidor de manufatura, uma aplicação envia os comandos necessários para uma fresadora CNC.
O sistema WebCAD3D é parte do sistema denominado de CyberCut (http://cybercut.berkely.edu) que realiza a integração CAD/CAPP/CAM para fabricação de peças prismáticas a partir do WebCAD3D que é um applet, iniciado a partir de um browser. A arquitetura do WebCAD3D, Cybercut, é apresentada na figura 5.8. Segundo WANG (1998) uma comunidade de manufatura globalizada será o futuro do ambiente de manufatura. Cada membro da comunidade irá fornecer seus próprios serviços e ferramentas. Este novo paradigma para o ambiente de manufatura foi definido de TeleManufatura.
O sistema é disponível para os usuários como um Java applet que pode ser usado em combinação com um web browser. É usado a Modelagem Sólida Destrutiva (DSM) de maneira a refletir o processo de fabricação que trabalham com operações de fresamento, utilizando o conceito de features de usinagem/manufatura (subtrativas). Uma ferramenta de modelagem 2D no lado do cliente (applet) é usada para criar peças prismáticas 3D. Uma versão 3D-wireframe do projeto é visualizada pelo cliente.
Como um meio termo entre os ambientes de manufatura e projeto, uma variação do DSM, o DSM Solid Interchange Format (SIF) é usado. Este contem informações adicionais da peça, como tolerâncias e informações específicas de usinagem, como raio de canto. O cliente faz uso de um conjunto pré-definidos de features de usinagem, armazenadas em uma biblioteca, que podem ser fabricadas na máquina disponível. Esta biblioteca de projeto está situada no servidor.
A modelagem por features de usinagem permite uma fácil inter-operabilidade entre projeto e fabricação e é extremamente adequado para sistemas deste tipo (projeto e fabricação de peças prismáticas). Durante a criação das features, um checador de regras de projeto garante a manu-faturabilidade do modelo. Exemplos de regras de projeto incluem as condições que furos e de certas features que não podem ser posicionadas com relação a uma aresta.
Cybercut é um sistema orientado ao problema de Projeto e Fabricação baseado na web (BROWN e WRIGHT, 1998), consistindo de três componentes:
CyberView (KIM, 1988) usa modelagem assíncrona combinada com visualização via web browser. A estrutura do sistema é mostrada na figura 5.9. Uma Base de Dados Orientada a Objetos (OODB) é localizada no lado do servidor. Esta contêm arquivos de dados dos produtos utilizando o padrão STEP, produzido por uma aplicação CAD independente. Os arquivos STEP são enviados para a base de dados pelo protocolo FTP. Desde que a maioria das aplicações CAD não podem ser executadas sobre o mesmo sistema computacional, esta abordagem foi o modo mais fácil de garantir que os usuários pudessem usar seus próprios sistemas CAD. A modelagem não síncrona é naturalmente possível, pois aplicações CAD stand-alone são usadas para produzir e manipular arquivos STEP. Para visualizar em um web browser, VRML é usada. Certamente o browser deve ter integrado um visualizador VRML. KIM (1998) discute a tradução do formato STEP para um modelo VRML. Por exemplo, B-splines e NURBS têm de ser transformados em uma malha de poligônos, pois VRML não é capaz de manipular primitivas como estas. O usuário pode navegar através do modelo VRML e avaliá-lo olhando todos os seus lados, adicionar comentários que serão gerenciados pelo gerenciador de visualização e comentários, possibilitando que outros usuários vejam o modelo um pouco mais tarde, tendo acesso aos comentários já feitos e armazenados na OODB.
A URL http://tmf.sdsc.edu apresenta um projeto da pesquisa e desenvolvimento chamado Tele-Manufacturing Facility (TMF). O TMF oferece um serviço de Prototipagem Rápida (RP) automatizado baseado na Internet. O sistema disponibiliza um serviço para que usuários remotos tenham a possibilidade de fabricarem um protótipo de uma peça a partir do arquivo em formato ``.STL'' (estereolitografia).
Ao estabelecer uma conexão através da Web, o usuário submete o trabalho a ser produzido, e o sistema automaticamente o mantém em uma fila para ser processado posteriormente em uma máquina Z 402 da Z Corporation. Um outro esforço tem sido empreendido no sentido de reduzir a necessidade de verificação manual, por uma pessoa, dos arquivos de peças RP. Os arquivos ``.STL'', para Prototipagem Rápida, contêm falhas geométricas e topológicas. Atenção especial está sendo dada no processo de verificação automática para determinar estas falhas nos arquivos ``.STL'', e em muitos casos, corrigi-los automaticamente.
LUO et al. (1999) apresentam a arquitetura de outro sistema de prototipagem rápida baseado na Web (http://www.ia.ee.ccu.edu.tw). O sistema utiliza uma arquitetura Cliente/Servidor para acessar a máquina de RP fazendo a sua teleoperação remota. O sistema TFM, descrito anteriormente, não permite a teleoperação da máquina apenas a submissão do arquivo de uma peça a ser processada posteriormente sem intervenção do cliente. É utilizado a mesma arquitetura dos sistemas de teloperação desenvolvidos na UnB/Graco. A geração do arquivo ``.STL'' não está disponível no sistema, ou seja, o usuário terá de fazer o download de seu arquivo .STL gerado em seu próprio sistema de modelagem CAD. Todos os sistemas relacionados na literatura só realizam o serviço de RP desde de que seja enviado o arquivo ``.STL'' e/ou a teleoperação da máquina pelo cliente usando a Internet.
MAS é uma ferramenta computacional para auxíliar o projetista durante o ciclo de desenvolvimento de produto, em especial na seleção de material e processo de manufatura, desenvolvida por SMITH (1999) na sua tese de doutorado. MAS gera um diálogo com o projetista, inquerindo-o sobre tamanho de lote, tolerâncias típicas, dimensões, forma, requisitos de custos, entre outros. A cada passo é apresentado ao usuário uma lista com um ranking das opções de manufatura. Um método similar é usado para definir os requisitos para seleção de materiais (propriedades mecânicas, físicas e químicas), geramdo um ranking de materiais.
MAS foi desenvolvido como um applet Java disponível via Web através da URL http://cybercut.berkeley.edu/mas2typeset@protect @@footnote SF@gobble@opt MAS2 é parte do sistema Cybercut. . MAS executa os cálculos utilizando a dados disponibilizados através de base de dados remotas, que podem ser manuseadas e atualizadas através de ferramentas administrativas através da Web.
São descritas algumas estruturas que podem ser usadas no desenvolvimento de sistemas e aplicações cooperativas.
O WELD (Web-based Electronic Design Environment) fornece uma estrutura de plataforma independente para acoplamento de aplicações e ferramentas CAD existentes de maneira a criar um ambiente de projeto cooperativo (CHAN, 1998). A arquitetura WELD (figura 5.10) está conectada a servidores remotos, serviços de rede e clientes. Os clientes podem ser Java applets ou browsers, com suporte em rede fornecido por um web browser, ou clientes genéricos com suporte à rede integrado. Estes clientes genéricos podem ser implementados em linguagem C, C++ ou Java.
O COCA (Collaborative Objects Coordination Architecture) é uma arquitetura de coordenação genérica que permite aos usuários utilizarem regras sociais em um sistema cooperativo (LI, 1998). Estas são especificadas usando uma linguagem de especificação baseada em lógica. A arquitetura COCA consiste de três camadas (Figura 5.11). O nível mais baixo é a camada de comunicação, que usa IP Multicast e Unicast, mandando mensagens para um endereço especificado da rede (IP). Acima da camada de comunicação temos a camada de cooperação/colaboração. É implementada por máquinas virtuais que gerenciam as funções dos diferentes usuários e mantém um conjunto individual de regras de decisão que são específicas para uma função. A camada do topo é chamada de camada de aplicação. Esta contém ferramentas de controle da sessão, ferramentas de apresentação de dados, ferramentas de comunicação e interfaces de manipulação. Todas estas ferramentas estão disponíveis para um usuário na camada de aplicação.
DistView (PRAKASH, 1994) é um toolkit que pode ser usado para desenvolver aplicações cooperativas para uso sobre redes de comunicação de área (WAN). É usado a abordagem replicada, onde objetos compartilhados têm cópias locais disponíveis sobre todas as aplicações participantes, que são atualizadas, apenas, quando mudanças tenham ocorrido. A estrutura do ambiente DistView é apresentada na figura 5.12.
Este capítulo descreve a implementação de uma interface (GUI - Graphical User Interface) para teleoperação de uma Máquina de Oxi-corte Industrial da White Martins (AutoCut 2.5L) com Comando Numérico Computadorizado da MCS Engenharia (MCS-520) e de um ambiente integrado CAD/CAM para programação da máquina de oxi-corte, utilizando os Protocolos Internet (TCP/IP) via Web (http://weboxicorte.graco.unb.br) em um contexto de TeleManufatura, desenvolvida pelo doutorando et al. , na Universidade de Brasília.
Este sistema é apresentado como referência, para se ter uma idéia das funcionalidades, normalmente, presentes em sistemas de TeleManufatura. Deve ser tomado como referência por se tratar de um pequeno sistema integrado para modelagem baseado em features de forma (2D), geração do programa NC e fabricação da peça remotamente, através da teleoperação da máquina de Oxi-corte CNC.
As GUIs disponibilizam ao usuário remoto funções para o controle da máquina, bem como, um ambiente CAD/CAM para geração do código G baseado no padrão RS 274. O sistema baseia-se na arquitetura cliente-servidor, utilizando-se de um ¨browser¨ como cliente e um computador pessoal com sistema operacional Linux como servidor. A GUI é baseada na linguagem de programação Java e HTML e tem como servidores programas desenvolvidos na linguagem C para controle da máquina.
A comunicação entre o servidor e a máquina é realizada através do protocolo de comunicação DNC (Comando Numérico Distribuído) do próprio CNC. A GUI para teleoperação consiste em uma página HTML contendo applets Java (para o controle da máquina) e imagens capturadas por uma Webcam. Desta forma o usuário, através de um ¨CNC virtual¨ é capaz de enviar e executar programas, assim como as operações básicas da máquina. A segunda GUI para programação NC é orientada a máquina da White Martins, onde, o Projeto é baseado em Features. As features são elementos geométricos (linhas e arcos de circunferência) que são adicionados durante o processo de modelagem 2D, para definir o perfil da peça a ser cortada.
A interface desenvolvida mostrou-se bastante versátil, permitindo a programação e a teleoperação da máquina de qualquer lugar provido de computador e Internet.
A globalização tem afetado diretamente as empresas, os consumidores e as economias dos países. Componentes e produtos variados e de boa qualidade, fabricados em diferentes países, têm sido disponibilizados a pessoas em qualquer parte do mundo, muitas vezes a preços iguais ou inferiores aos produtos nacionais. A Internet tem contribuído significativamente para a globalização, pois ela permite uma comunicação mais rápida entre pessoas e também empresas. Uma prova disto é a quantidade de recursos que têm sido gastos no comércio eletrônico. Analistas estimam que em 1999 o business to costumer (B2C) girou em torno de US$ 17 bilhões, e o business to business (B2B) em US$ 68 bilhões (POMBO, 1999). Além da venda de itens como carros, jóias e livros através da Internet, esta tecnologia tem sido utilizada com sucesso em outras atividades importantes, como a manutenção remota de equipamentos (ROCKWELL, 2002) e a cirurgia do cérebro efetuada por um robô comandado remotamente por um cirurgião localizado a centenas de quilômetros de distância (SCIENTIFIC AMERICAN, 2000).
Tendo em vista a importância e popularidade da Internet, é apresentado um sistema para a teleoperação de uma máquina de oxi-corte CNC, visando a aplicação e domínio de ferramentas relacionadas à Internet, bem como a disponibilização das funções de controle para qualquer usuário que queira manipular remotamente a máquina. Neste capítulo é feita uma descrição da Interface Gráfica do Usuário (GUI), através da qual efetua-se a entrada dos dados referentes à peça (produto) a ser fabricada. Descreve-se também outros módulos utilizados que permitem a teleoperação desta máquina.
Como outras vantagens do desenvolvimento deste sistema, pode-se citar: (i) o usuário não necessita adquirir a máquina para fabricar a peça desejada; (ii) o sistema pode ser utilizado como uma plataforma educativa sobre assuntos como Internet, Telemanufatura, Teleoperação, Comando Numérico e Oxi-corte.
A GUI consistiu no desenvolvimento de um applet utilizando a linguagem de programação JAVA para a integração CAD/CAM do processo de oxi-corte baseado na tecnologia de Projeto by Feature, utilizando a modelagem por features de forma. No caso são utilizadas, basicamente, duas features de forma para permitir a modelagem da peça 2D a ser fabricada pelo processo de oxi-corte NC (Comando Numérico): linhas e arcos.
O Java applet permite a modelagem de uma peça utilizando coordenadas cartesianas e a geração do código G para o processo de oxi-corte. O applet também permite a inserção de dados referentes ao planejamento do processo, sendo estes: tempo de pré-aquecimento, velocidade de corte e tamanho da chapa bruta. Desta forma o Projeto by Features contempla as visões de projeto e de manufatura durante o ciclo de desenvolvimento do produto.
A implementação da interface CAD foi feita de forma parametrizada (projeto paramétrico) u-sando a linguagem Java através da função canvas que cria uma área retangular de coordenadas cartesianas, permitindo o desenho de formas geométricas (features: linhas e arcos), utilizando-se da API padrão AWT, que permite a criação de controle da GUI.
O modelo da peça é representado em termos de features de projeto. As features de manufatura são obtidas através da conversão ou mapeamento de features de projeto para o domínio da ma-nufatura, sendo o mapeamento feito através da técnica um-para-um, ou seja, a feature resultante do mapeamento é idêntica à feature mapeada (SWAN e MANTYLÄ, 1995).
Um dos problemas encontrados no canvas foi que o ponto (0,0) fica localizado no canto superior esquerdo do retângulo ao invés do canto inferior esquerdo. Implementou-se na GUI quatro comandos de máquina para o corte:
Para cada função G utilizou-se uma cor diferente, de forma que seja possível identificar, visualmente, os diferentes passos que foram feitos na modelagem da peça. Para a implementação da feature linha, interpolação linear, utilizou-se uma função do Java denominada drawline que tem a função de desenhar uma reta no canvas. Para isso deve-se passar quatro parâmetros (xo,yo, x1,y1) que são as ordenadas e abcissas do ponto inicial e do ponto final. Estes parâmetros devem ser números inteiros.
Para a implementação das features de arco de circunferência, interpolação circular, utilizou-se a função drawarc que desenha um arco na área delimitada no canvas. O arco é desenhado dentro do retângulo definido, passando-se à função seis parâmetros:
Quando a máquina de oxi-corte opera em modo DNC (Comando Numérico Distribuído), ficam acessíveis à estação remota (host) praticamente todos os comandos relativos à operação local do CNC, bem como informações de status indispensáveis ao controle das operações da máquina (MCS, 1999) e (MARTINS, 1999). A figura 6.2 apresenta o sistema DNC da MCS. A conexão do computador (host) ao CNC é feita através da interface serial RS-232.
Para que os comandos sejam entendidos pelo CNC, o periférico/host deve enviar as mensagens no seguinte formato/protocolo: @ C1 C2 C3 Argumentos !
Onde:
A MCS (1999) desenvolveu um conjunto de códigos para que as mensagens passadas para o CNC possam ser acompanhadas ou não de argumentos apresentados na Tabela 6.1.
O comando e envio de teclas permite a operação remota do CNC, da mesma forma que a operação local pelo teclado. Além disso, a MCS (1999) disponibilizou as teclas para funções especiais. Existe a possibilidade de bloqueio de operação local (via teclado) do CNC, bem como do potenciômetro de override de avanço (que assume 100%). Pode-se solicitar o status do comando sobre: modo de operação corrente e status de execução de funções auxiliares (M/S/T). Para o modo de operação corrente, tem-se a identificação da informação de status no argumento da mensagem:
O sistema de Teleoperação da Máquina Oxi-Corte, denominado WebOxiCorte, é baseado em uma arquitetura Cliente-Servidor (ÁLVARES e TOURINO, 2000) sendo constituído por dois módulos (SOUSA, 2000):
A figura 6.4 apresenta a arquitetura detalhada do sistema onde são apresentados os principais módulos do sistema de teleoperação via Internet (TCP/IP).
O servidor de Teleoperação WebOxiCorte (figura 6.4) é constituído pelo servidor de vídeo e servidores de teleoperação da máquina que disponibilizam serviços de comando, execução de programas, download e upload de programas, tratamento de erros e demais funções associadas ao protocolo DNC da MCS (1999). O servidor de vídeo é responsável pela captura de vídeo e sua distribuição através do protocolo TCP/IP (Internet). Os demais servidores, associados aos serviços de teleoperação, propriamente dito, trabalham de modo bidirecional, recebendo comandos através da Internet e enviando dados de status da máquina.
A conexão Internet é implementada através de canais de comunicação denominados de sockets (ARNETT, 1994) entre os módulos WebOxiCorte e módulo Usuário/Cliente. Usualmente este tipo de conexão é programado usando as chamadas BSD Library (comandos como socket, bind e accept). Neste trabalho, o servidor inetd foi usado para estabelecer a conexão a fim de facilitar o desenvolvimento dos servidores (ARNETT, 1994). A figura 6.5 apresenta a utilização do servidor inetd como gerenciador de conexões. Esta mesma abordagem é utilizada por serviços de telnet, ftp e finger, entre outros, em ambiente Unix (TOURINO, 2000). O servidor inetd ao receber uma conexão via TCP/IP cria uma cópia dele mesmo, através do comando fork, e executa o programa servidor, normalmente escrito em C ou perl, através do comando exec (figura 6.5). A utilização do inetd é vantajosa em relação a programação convencional utilizando diretamente os canais de comunicação (sockets) pois reduz a carga sobre o sistema operacional e facilita o desenvolvimento de programas que realizam a comunicação via Internet.
O servidor de vídeo é responsável pela captura de vídeo e o envio de dados via Internet. As imagens são captadas por uma WebCam, enviadas via TCP/IP e animadas. Foi utilizado o mecanismo de animação de vídeo do Netscape denominado Server push que dispensa a utilização de plug-ins (ÁLVARES et al. , 1999). Através deste mecanismo faz -se o envio contínuo de dados do servidor WebCam para o browser (Netscape), mantendo a conexão entre os dois aberta, e o próprio browser faz a animação em função da quantidade de frames enviados por segundo (WEINMON, 1997). O servidor webcam foi implementado de forma distribuída em uma segunda estação de trabalho (Solaris, Sparc20) utilizando a placa de captura de imagens SunVideo (SUN, 1994).
Este servidor aceita conexões via TCP/IP através do programa/servidor inetd (daemon) configurado para aceitar conexões através da Porta 8088 (SOUSA, 2000). Uma vez estabelecida a conexão o servidor aguarda por comandos enviados pelo cliente (browser) executando-os caso a sintaxe esteja correta. A figura 6.6 apresenta os comandos aceitos pelo servidor WebOxiCorte. Alguns exemplos de comandos aceitos pelo servidor são (SOUSA, 2000):
Este servidor é responsável pelos comandos de movimentação da tocha de oxi-corte. Este servidor foi denominado de Posicionamento da Tocha (Controle) e aceita conexões via TCP/IP através do programa inetd pela porta 8089. Alguns comandos aceitos pelo servidor são:
Este servidor é chamado de EnvP, sendo configurado no inetd pela porta 8091. Sua finalidade é enviar programas para a máquina, colocando a máquina em modo de comunicação externa e enviando para a máquina o programa NC (comando numérico) desejado.
A Interface Gráfica com o Usuário (GUI - Graphical User Interface) é baseada na linguagem de programação Java, criada pela SUN MICROSYSTEMS (1999). A GUI, front-end do usuário consiste em dois applets, ou seja, dois programas carregados pelo browser: Na figura 6.7(a) é apresentado o Applet de Controle do CNC, e na figura 6.7(b) o Applet de Posicionamento da Tocha . A animação da recepção das imagens em formato jpeg (ÁLVARES et al. , 2000) é realizado pelo próprio browser, no caso o Netscape. Durante a operação do sistema WebOxiCorte o usuário visualiza a animação gerada. Caso seja necessário pode-se realizar um zoom da imagem pressionando o botão esquerdo do mouse sobre a animação.
A GUI implementada para a teleoperação da máquina de Oxi-Corte CNC é apresentada na figura 6.8. O sistema pode ser acessado através do site http://weboxicorte.graco.unb.br, sendo que somente usuários cadastrados (login & password) podem utilizar o sistema. Os testes de integração do sistema consistiram na geração do programa NC utilizando a GUI de modelagem baseada em features, o download do programa em Código G gerado no passo anterior para a máquina CNC, seguido da execução do programa, a fim de realizar o corte da peça idealizada; o qual foi executado com sucesso.
Devido as limitações de recursos da máquina, que poderão ser sanados com um update de eprom, não foi possível implementar um sistema de status de memória da mesma. Outra limitação da máquina diz respeito a regulagem da chame do processo de oxi-corte que só pode ser realizada através de operação manual. Outra restrição em sistemas de teloperação via Internet refere-se a largura de banda e aos atrasos inerentes ao próprio protocolo TCP/IP (ÁLVARES et al. , 2000 e 1999). Para resolver este problema é necessário dotar o sistema de teleoperação no servidor, junto à máquina de Oxi-corte, de mecanismos que possibilitem a tomada de decisão em situações críticas sem depender do lado do cliente, no caso o usuário/operador.
Assim é necessário dotar o sistema de alguma inteligência para resolver conflitos que poderão ocorrer durante o processo de teleoperação. Os comandos transmitidos para o servidor são transferidos de forma rápida, por solicitarem uma pequena largura de banda. Por outro lado, para a realimentação em vídeo é necessário uma largura de banda da ordem de 16 kbytes/s em função da quantidade de frames utilizada na animação A GUI baseada em Java possibilita a obtenção de ótimo resultado visual, bem como independência de plataforma. Atualmente Java é a melhor solução para desenvolvimento de front-end para aplicações em telemanufatura e em particular em sistema de teleoperação.
O capítulo descreve um sistema de Telemanufatura apresentando o desenvolvimento do sistema WebOxiCorte voltado para modelagem by features via Web, consistindo de um ambiente integrado de CAD/CAPP/CAM e de um sistema de teleoperação da máquina de oxi-corte CNC utilizada.
O sistema apresentou bons resultados no que concernem as funções diretamente relacionadas ao controle da máquina de oxi-corte através do seu protocolo de comunicação (DNC), por requerer a transmissão de mensagens com poucos bytes de tamanho para implementar estas funções. Entretanto, a realimentação através de vídeo exige maior largura de banda para aplicações em tempo real. O sistema comprovou sua operacionalidade, conectando o cliente ao servidor WWW e este ao processo de oxi-corte, permitindo a modelagem da peça, geração do Código G e o envio e recebimento de informações. É necessário levar em conta os aspectos referentes à segurança. Uma resposta da máquina CNC ao servidor pode ser degradada em função de atrasos de comunicação entre o servidor e o cliente. Assim, os aspectos de tempo real têm grande importância de acordo com o nível de segurança exigido. A tecnologia de TeleManufatura e em especial de Teleoperação via Internet encontra-se em estágio embrionário de desenvolvimento, tendo sua aplicabilidade ainda reduzida devido à baixa largura de banda disponível para transmissão de dados.
A interface desenvolvida foi testada mostrando-se adequada para aplicação de teleoperação da máquina de oxi-corte. A evolução da Internet, em especial com o Projeto Internet II, que disponibilizará uma maior largura de banda para transmissão de dados certamente motivará novos desenvolvimentos na área. Muitas empresas estão investindo no desenvolvimento de soluções em sistemas de teleoperação via Internet para aplicações prediais e residênciais, denominados de casas e prédios inteligentes. Existem algumas aplicações comerciais disponibilizadas para a área de Telemanufatura, entretanto a maior parte dos sistemas disponíveis são ainda de origem acadêmica.
Num sistema CAPP generativo, a lógica de decisão do sistema é o coração do software e direciona o fluxo do programa (FERREIRA, 1996). A lógica de decisão determina como um processo é selecionado. A decisão mais importante da lógica de decisão é combinar as capacidades dos processos com as especificações de projeto. Capacidades de processo podem ser descritas como regras de produção do tipo ``IF...THEN...''. Tais regras podem ser armazenadas sob a forma de sentenças em um simples programa ou em kernel de sistema especialista como o CLIPS e FUZZYCLIPS (REZENDE, 1996).
Existem vários métodos para descrever a estrutura de decisão no planejamento do processo. Os métodos de representação do conhecimento relacionam-se diretamente à lógica de decisão nestes sistemas. Os seguintes métodos de lógica de decisão são utilizados no planejamento do processo: tabelas de decisão e técnicas baseadas em inteligência artificial destacando-se os sistemas especialistas, lógica difusa, redes neurais, sistemas multi-agentes e algoritmos genéticos (WANG e LI, 1991).
É dado um destaque especial aos sistemas de gerenciamento de bases de dados relacional. Uma base de dados relacional é a maneira mais adequada de compartilhar dados para as diversas atividades a serem desenvolvidas para integração CAD/CAPP/CAM. Durante a modelagem by features, no cliente, é necessário o armazenamento das instâncias de classes de features definidas no processo de modelagem da peça. Estas informações devem ser armazenadas em uma Base de Dados no servidor. Com estas informações disponíveis, o sistema de CAPP poderá utilizar diversos métodos para resolução dos problemas referentes ao planejamento de processo. Os diversos módulos do CAPP podem trabalhar utilizando uma arquitetura multi-agente em que cada atividade a ser executada pelos módulos do CAPP seria considerada um agente.
Neste capítulo são apresentados uma pequena revisão sobre sistemas de gerenciamento de Base de Dados com enfoque em uma aplicação desenvolvida pelo doutorando et al. , utilizando os sistemas de gerenciamento de base de dados relacional Msql e Mysql e a abordagem de CAPP Variante. A seguir são apresentados algumas técnicas utilizadas na tomada de decisão de um CAPP generativo, e finalmente uma introdução sobre Sistemas Multi-Agentes e a arquitetura de desenvolvimento de agentes denominada KQML. Este capítulo é baseado nos trabalhos de ÁLVARES et al. (2002), ÁLVARES (2001), ALVINO (2001) e MANET (2002).
Segundo ALVINO (2001) os modelos de base de dados são coleções de ferramentas conceituais para a descrição de dados, relacionamentos, semântica e restrições. Existem modelos lógicos e físicos. Os modelos físicos são usados para descrever os dados no Nível Físico, eles não serão revistos pois estão muito fora do escopo deste trabalho. Os modelos lógicos são empregados nos níveis conceituais e de visão, sendo atualmente uma grande área de pesquisa e desenvolvimento (CUNHA, 2000). Existem basicamente dois grandes grupos de modelos lógicos: Modelos Lógicos Baseados em Registros e Modelos Lógicos Baseados em Objetos.
Os Modelos Lógicos Baseados em Registros são assim denominados porque a base de dados é estruturada em registros de vários tipos, cada um dos quais define um número fixo de campos ou atributos, com tamanhos ou comprimentos também fixos. Os três modelos lógicos mais difundidos são (DANTE, 1991), (CUNHA, 2000) e (NETO, FURLAN e HIGA, 1988):
São os modelos mais usados atualmente. Eles representam uma coleção de dados interrelacionados em forma de tabelas ou relações bi-dimensionais. As linhas das tabelas possuem os dados armazenados, também chamados de registros ou domínios. As colunas são campos ou atributos que especificam a denominação e o tipo destes dados. As tabelas estão relacionadas entre si numa correspondência unívoca, através de uma coluna ou combinação de colunas denominadas de chave primária, nas quais a qualquer momento, nenhum par de linhas da tabela contém o mesmo valor. Cinco operações fundamentais baseadas na álgebra relacional são responsáveis pela manipulação da base de dados (transações): seleção, união, projeção, produto, e diferença. Em adição, pode-se definir combinações em termos das operações de produto e seleção. Assim, dados complexos podem ser modelados com base em simples tabelas.
Abordagem dominante na década de 60, são representados por estruturas em árvore cujos elementos, chamados de nós, estão dispostos de maneira hierárquica através de ligações únicas. O topo da estrutura, comumente chamado de raiz, é o objeto modelado através da combinação dos vários nós. Esta estrutura é rápida e fácil mas poucos elementos no mundo podem ser modelados de maneira puramente hierárquica, em adição, a implementação hierárquica usualmente cria redundâncias e inconsistências.
Desenvolvidos na década de 70, são mais genéricos, pois cada elemento pode ser ligado a vários outros elementos de maneira direta, sendo portando menos restritivos que a estrutura em árvore. A desvantagem está em sua complexidade tanto a nível da estrutura de dados quanto aos algoritmos associados.
A proposta dos Modelos Lógicos Baseados em Objetos é relativamente mais recentes que os baseados em registros. Ela surgiu com a necessidade de se construir base de dados com melhores capacidades de descrição de aspectos semânticos das informações armazenadas. Os dois principais componentes deste grupo são (DANTE, 1991) e (CUNHA, 2000):
Este modelo se baseia na percepção do mundo como uma coleção de entidades e relacionamentos. Uma entidade é um objeto existente, físico ou abstrato, que pode ser descrito por uma série de atributos associados. O relacionamento é a representação da associação existente entre várias entidades, ao qual também podem estar associados atributos descritivos, de modo que várias regras para controles de integridade podem ser automaticamente estabelecidos.
O processo atual de desenvolvimento das técnicas de modelagem de informação apontam para a intensificação do uso de Modelos Orientado a Objeto. Estes modelos são baseados em uma coleção de objetos com atributos ou variáveis de instância manipuladas através de métodos internos. Eles incorporam os conceitos de herança, abstração, polimorfismo e encapsulamento da técnica programação orientada a objeto. Os objetos se relacionam uns com os outros trocando mensagens através de seus métodos. Aqueles que contêm os mesmos tipos de variáveis de instância e métodos são agrupados em classes, as quais podem ser vistas como o tipo de definição do objeto ou um tipo de dado abstrato. É possível organizar o modelo em hierarquias de classes com vários níveis de abstração e combinar objetos para definir outros mais complexos. A existência de métodos e atributos internos permite o encapsulamento de comportamentos complexos com semânticas detalhadamente definidas, que não são facilmente representados através de simples relações.
O gerenciador do base de dados é um módulo do DBMS (Sistema de Gerenciamento de Base de Dados) que disponibiliza uma interface entre os dados de baixo nível e os aplicativos e consultas submetidas à base de dados. Seu objetivo fundamental é facilitar e simplificar o acesso aos dados. Este módulo é basicamente responsável por (ZAIANE e KOPERSKI, 1998):
Segundo WANG e WALKER (1989) a informação de manufatura pode ser dividida em duas grandes áreas:
Esta seção descreve uma implementação de um CAPP Variantetypeset@protect @@footnote SF@gobble@opt Planejamento de Processo Auxiliado por Computador segundo o método Variante. em ambiente Web denominado de WebCAPP. Para tal implementação, seguiu-se os conceitos de Tecnologia de Grupo, que regeu a classificação das peças. O sistema utilizado para classificação das peças foi o OPTIZ.
Na estruturação em ambiente Web, utilizou-se o MySQL (DBMS), PHP, plataforma Linux e o servidor Web Apache (open source). Conseguiu-se obter, como resultado, um ambiente Web de fácil utilização, capaz de atuar como auxílio ao projetista, poupando-o do trabalho de cálculos e, em alguns casos, até mesmo de pesquisa. Com o auxílio do computador, o trabalho de desenvolvimento dos planos de processo torna-se muito mais rápido, tendo em vista a existência de uma base de dados e a facilidade de não lidar com papéis (exceto na impressão do plano). Possui, também, tratamentos de erro, que impedem o projetistatypeset@protect @@footnote SF@gobble@opt Também denominado nesta seção de processista. de inserir dados errados, poupando tempo com revisões e reparos de projeto. Destaque maior ao fato da implementação ser feita para a Web, podendo o projetista/processista fazer consultas a projetos e inserir novos projetos de qualquer lugar que possua um computador conectado à Internet. Os dados são alimentados na base de dados do servidor.
O sistema de Planejamento de Processo Variante concebido tem por objetivo prover padronização e facilidades de produção e manutenção no ciclo de desenvolvimento de produto, em particular, nas atividades associadas ao planejamento de processo em um contexto de Tecnologia de Grupo.
O sistema é constituído de um servidor, no qual está funcionando os aplicativos PHP4 (linguagem de programação para Web, que atua da forma server-side script ), MySQL (como um sistema de gerenciamento de base de dados relacional), servidor WEB APACHE e o sistema operacional Linux, ferramentas bastante difundidas, de distribuição open source e de fácil acesso à documentação. O sistema pode ser acessado através da URL http://WebCAPP.graco.unb.br.
O PHP garante a interatividade, leveza e rapidez para o HTML do ambiente, enquanto o MySQL tem o papel de armazenar as informações já adicionadas e as que ainda serão inseridas. O servidor tem acesso à Internet para que possa disponibilizar os serviços dos programas, podendo também oferecer os serviços em uma Intranet de uma empresa de manufatura. Tal servidor ainda poderia ser dividido em um servidor de aplicativos e um servidor de base de dados, caso necessário.
O sistema é baseado na arquitetura cliente/servidor. Nota-se que nenhum dos softwares utilizados necessita de licença para utilização, o que não gera custo algum com a obtenção e manutenção dos mesmos. O funcionamento do sistema é baseado em CAPP Variante (Planejamento de Processo Auxiliado por Computador), ou seja, o novo projeto é desenvolvido a partir do projeto padrão da família à qual irá pertencer (GROOVER, 1987) e (HALEVI e WEILL, 1995). Neste projeto padrão são feitas as modificações necessárias para este se adequar ao novo projeto, tarefa muito facilitada pela presença da base de dados relacional (WANG e WALKER, 1989).
Em grande parte dos campos o projetista apenas seleciona o item desejado em uma lista existente na base, em outros, é auxiliado por um controle de erros nos campos de entrada. Tal controle evita erros, junto com a necessidade de várias revisões, correções e atrasos decorrentes dos mesmos. Evita, também, a necessidade de utilização de papel, tanto para o projeto, como em fontes de consulta sobre operações, procedimentos, projetos anteriorestypeset@protect @@footnote SF@gobble@opt Constam na base de dados e são recuperados por procedimentos de busca e por um "Ajuda", que é acionado por um menu. .
Assim o procedimento para arquivar e recuperar os projetos são facilitados e com menor custo. O sistema tem seus projetos divididos de acordo com famílias de peças, baseadas em Tecnologia de Grupo, sendo feitas divisões em famílias de acordo com as semelhanças geométricas entre as peças.
Pode-se dizer que a Tecnologia de Grupo (GT) é "a percepção de que muitos problemas são similares, e que problemas similares, uma solução única pode ser encontrada para um conjunto de problemas, poupando-se assim tempo e esforço" (ÁLVARES et al, 1991). Como se observa da definição de GT, peças classificadas e agrupadas em famílias produzem uma base de dados conveniente para rápida solução de problemas e fácil de ser gerenciada.
Assim que um usuário entra no site onde se localiza o sistema (http://WebCAPP.graco.unb.br), são pedidos a ele um login e uma senha. A tela de login pode ser vista na figura 7.1. Estes serão conferidos pelo servidor para que, em caso de sucesso, o usuário possa ter acesso ao sistema, denominado de e-CAPP. Estes usuários serão cadastrados no sistema de acordo com quatro categorias: administrador, projetista, supervisor e usuário.
O administrador é o responsável pela manutenção do sistema, tendo acesso às tabelas da base de dados, ao servidor e ao sistema de cadastro de usuários e todas às partes do sistema. O projetista tem acesso ao sistema WEB, mas não ao servidor, cadastro de usuários e tabelas. Pode criar e alterar projetos. O supervisor tem todos os privilégios do projetista e mais a permissão de exclusão de projetos, famílias e operações. O usuário comum tem apenas o privilégio de leitura e pesquisa, não podendo entrar na tela de edição e alteração de projetos e, muito menos, no de exclusão. Estas definições ficam alocadas numa tabela de cadastro na base de dados. Ficam criptografados por um algoritmo de criptografia de único sentido, ou seja, não há algoritmo de voltatypeset@protect @@footnote SF@gobble@opt Cada vez que alguém inserisse a senha, seria criptografada e comparada com a existente na base de dados, que fora guardada no momento do cadastro. . O administrador não tem acesso à senha de nenhum usuário, pois estariam criptografadas.
A codificação dos projetos, famílias e operações foram baseadas no sistema Optiz (FERREIRA, 1996) e (GROOVER, 1987). Foi escolhido por ser base de inúmeros outros sistemas, ser de fácil compreensão e adequado a diversas aplicações. A concepção básica do sistema está definida em dois campos de código. Um código de forma, composto por cinco dígitos e uma parte suplementar, com outros quatro dígitos. Outro sistema de codificação estudado foi o KK-3 (ÁLVARES et al, 1991). Desenvolvido no Japão, apresenta 21 dígitos, os quais permitem completa descrição das peças. Devido a sua grande extensão, preferiu-se utilizar o Optiz, por ser mais compacto e simples de implementar.
As tabelas implementadas na base de dados foram baseadas em exemplos contidos em toda bibliografia mencionada e, logicamente, visam comportar os dados dos formulários e páginas do sistema. Foram concebidas com intenção de ser bem genéricas e amplas, para que pudessem ser utilizadas para projetos específicostypeset@protect @@footnote SF@gobble@opt Garantindo a portabilidade das tabelas e do sistema como um todo para vários tipos de projetos e detalhamentos. .
Ao colocar-se o cursor sobre o botão Projeto, aparecerá um menu com os seguintes tópicos: Pesquisar, Listar, Incluir, Alterar, Excluir. Ao clicar-se em qualquer uma das opções, será aberta a tela selecionada.
A tela pesquisar é uma entrada para o código ou para o nome do projeto sobre o qual se quer obter informações. A partir deste código, ou nome, será feita uma busca na base de dados resultando em uma tela onde são apresentados os projetos iguais ou semelhantes ao da buscatypeset@protect @@footnote SF@gobble@opt Por exemplo, se for digitado apenas um número do código ou apenas uma letra serão retornados todos os projetos que possuírem este número ou letra. .
Na tela Listar, tem-se uma lista de todos os projetos existentes na base de dados, em ordem crescente de código. Esta lista é paginada de acordo com o código, visando acelerar a busca e uma apresentação visual menos poluída.
Na tela Incluir, figura 7.2, há uma tela dividida em duas: no lado esquerdo existe a entrada dos dados do projeto; no direito, há uma tela de auxílio ao projetista, com um menu contendo opções para pesquisa ou listagem sobre projetos (pré-marcada), famílias ou operaçõestypeset@protect @@footnote SF@gobble@opt A opção escolhida irá orientar o funcionamento do resto desta página interna. . Ainda na tela de auxílio, existe outro menu para a escolha entre Listar (botão) e um campo entrada de consulta, que aparece como padrão, ou seja, sem um botão para escolha da opção.
Na tela da esquerda, de elaboração do projeto, existe um campo para entrada da família à qual irá pertencer a nova peça. Depois de escolhida a família, por código ou nome (podendo ser auxiliado pela tela da direita), essa tela da esquerda é substituída por uma composta pelos dados da peça padrão da família, para que possa ser editada, seguindo no padrão de elaboração do CAPP variante.
Nesta nova tela existe a possibilidade da composição manual (padrão) ou automática do número da nova peça: caso seja escolhido o modo automático, será aberta uma tela para que sejam colocados detalhes que formarão o tal código, como ser rotacional ou não, diâmetro, tolerâncias, etc.
Há, também, campos para entrada de detalhes e observações, onde existe um campo de texto livre para que sejam escritas as observações necessárias. Existe um campo para a anexação do arquivo que contém o projeto gráfico, feito em qualquer aplicativo de desenho.
A figura 7.3 apresenta uma visão geral do projeto, e se estiver todo correto, será confirmado e armazenado na base de dados. Cada projeto armazenado leva junto de si, automaticamente e obrigatoriamente, o nome do seu projetista. Na escolha listar, da tela auxiliar, são listados itens de acordo com a escolha citada, para que o projetista possa sanar suas dúvidas ao mesmo tempo que elabora um novo projeto. Esta escolha, listar, tem a mesma forma da listagem apresentada pelo botão listar (sub-menu do menu Projeto), apenas com menos detalhes. Necessitando-se de informações sobre um item da lista, pode-se clicar no mesmo e um link levará o usuário à sua página descritiva. Clicando-se no botão pesquisa, será feito o mesmo procedimento do botão pesquisa do menu principal.
Este modelo de divisão de tela será especialmente útil no momento de passar-se à escolha das operações que o projeto incluirá. Esta tela auxiliar pode parecer redundante, pois há os botões pesquisar e listar no menu Projeto, mas vale lembrar que o usuário comum não tem acesso às telas de inclusão e, portanto, à tela auxiliar mencionada.
Na tela de alterar é aberta uma tela para a entrada do código ou do nome do projeto que se quer abrir para alterar. Este campo é de tipo de procura. A partir da identificação do projeto será feita uma busca na base de dados. Se encontrado, será aberto para alteração nos mesmos moldes do incluir (com a divisão de tela para principal e auxiliar e tudo mais), mas já com os campos preenchidos pelos seus valores (anteriores à alteração que está ocorrendo). A data de inclusão e todo e qualquer tipo de alteração são guardados em um histórico do projeto, junto com o nome de login de quem criou e quem alterou. Ninguém tem permissão de escrita neste arquivo (nem é possível excluí-lo), ele existe enquanto existir o projeto e pode ser copiado para backup.
Na tela de excluir, tem-se o mesmo molde inicial da tela de alterar. A partir de um campo procura é encontrado o arquivo que se quer excluir. A diferença é que somente os supervisores de projeto têm permissão para excluir um projeto. A opção de excluir não é habilitada para os demais. Com a eliminação de um projeto, ficam gravados num histórico geral apenas a data de criação, eliminação, autor e o nome do supervisor que o eliminou, para fins de documentação.
Este menu se comporta da mesma maneira que o Menu Projeto. Ao colocar-se o cursor sobre o seu botão, aparecerá um menu com os tópicos: Pesquisar, Listar, Incluir, Alterar, Excluir. Ao clicar-se em qualquer uma das opções, será aberta a tela selecionada.
A tela pesquisar se comporta da mesma maneira que a pesquisar em projetos. Terá um campo para entrada de código ou nome de família e será retornado o(s) resultado(s).
A tela de listar funciona igual à tela listar de projetos (listando famílias, obviamente).
A tela incluir traz a possibilidade de incluir famílias. Nela o supervisor especifica detalhadamente as características da nova família. Traz também o mecanismo apresentado (em incluir projetos) de divisão de tela pra pesquisa ou listagem (no modelo já mencionado), para que se possa fazer comparações entre características das famílias existentes e das que estão sendo criadas e justificar sua criação. Na criação da família é criado o projeto padrão da mesma, que servirá de base para a criação dos demais projetos desta família. Este projeto padrão, por ser especial e guia dos demais projetos da família, somente poderá ser criado por um supervisor. Então, têm-se uma visão geral da nova família ("preview") e, se estiver todo correto, será confirmado e armazenado na base. Cada família armazenada leva junto de si, automaticamente e obrigatoriamente, o nome do seu projetista.
A tela de alteração de família traz as telas de características das famílias e as telas com os dados do projeto padrão, para ser editado. Somente podem ser alterados por supervisores, pois elas são a base vital do sistema industrial modelado em CAPP Variante. As famílias também têm um histórico de inclusão e alteração, assim como os projetos.
A exclusão, igual a projetos, somente pode ser feita por supervisores. Também são guardadas as informações no histórico geral.
Existem as mesmas opções dos menus apresentados.
A tela de pesquisar tem um campo para entrada de código ou nome de operação e será retornado o resultado.
A tela de listar funciona igual à tela listar de projetos (listando operações, obviamente).
A tela de inclusão, figura 7.4, funciona da mesma maneira apresentada nas telas incluir. O responsável pela inclusão de operações entra com o preenchimento e detalhamento da operação, tal como precisão, fixação da peça, tipo de material da peça bruta, especificações de tamanho da peça bruta e da peça finalizada, tipo de material e geometria da ferramenta utilizada na operação, observações, etc. Ou seja, tudo que for necessário para a especificação completa de uma operação. Também há a divisão de tela para propiciar pesquisas para guiar corretamente a criação da nova operação, como foi citado nos outros processos de inclusão, e o "preview" antes de armazenar (anexando o nome do criador, data e hora).
A tela de alteração tem as mesmas características da de alteração de Projetos. Traz tudo o que foi colocado na especificação da operação para ser editado. Traz o diferencial de poder ser editadas por projetistas, e não somente por supervisores, devido às possíveis mudanças em especificações de operação. Igualmente a Projetos, tudo fica guardado em um histórico.
A tela de exclusão também é igual a Projetos, com o mesmo requisito para exclusão para operações: ser supervisor.
Este menu, ao ser acessado, traz as opções: Tópicos de Ajuda, Atualização e Sobre o e-capp. Ao escolher a primeira opção, abrir-se-á uma nova janela onde constam os tópicos do programa listados pra que o usuário escolha sobre o que quer saber. Também há a opção de pesquisa de tópicos; a atualização é feita da internet, quando disponível e serve para atualizar tanto o Ajuda como o programa um todo.
Este menu pode ser clicado a qualquer momento para que seja apresentada a tela com informações do usuário, como login, nome, etc. são dados apenas de leitura para identificação. Caso algum dado esteja errado, há a necessidade de contato com o administrador. Nessa tela há a opção de mudança de senha, logout.
Abre-se um menu onde há dois botões: Supervisor e Administrador. O botão supervisor abre uma tela com um editor de texto livre, onde o usuário poderá escrever uma mensagem que será enviada para o e-mail do supervisor do projeto (ou da área). Ao clicar-se no botão administrador, acontece a mesma coisa, mas o e-mail irá para o administrador do sistema.
Apresentou-se os detalhes de implementação de um sistema baseado na Web para gerenciamento de projetos industriais baseado em CAPP Variante. A mesma abordagem será utilizada no desenvolvido da base de dados para o trabalho de doutoramento utilizando as mesmas ferramentas computacionais. Outras ferramentas para gerenciamento de base de dados foram utilizadas, em especial o Msql, uma base de dados SQL que implementa um subset da linguagem SQL padronizada. Este sistemas é mais simples de usar, entretanto não dispoem da mesma robustez e dimensão do Mysql. A título ilustrativo pode-se acessar mais duas aplicações desenvolvidas para planejamento de processos baseadas na Web e que estão disponíveis na URL http://usinagem.graco.unb.br. O MySQL é a base de dados open-source mais utilizada no mundo Unix, possuindo conectividade total através de APIs para as linguagens de programação Java, C e C++, o que facilita em muito sua integração aos módulos do sistema integrado CAD/CAPP/CAM a ser desenvolvido.
Analisando o sistema desenvolvido pode-se citar os muitos benefícios que sua utilização traz, tais como: redução no tempo de planejamento (aumento na produtividade), agilidade nas revisões (facilidade em buscar histórico), padronização de processos (todos irão utilizar um único modelo), criação de uma única base (garantindo integridade das informações), aumento da qualidade dos processos (utilização de informações visuais, gráficos, etc.).
É um sistema que possui muitas funções que parecem complexas, mas revelam-se extremamente simples para o usuário final. Facilitam extremamente o ciclo de desenvolvimento de produto, desde o processo de criação de projetos, famílias e operações, de gerenciamento e de composição de histórico de projeto.
O sistema permite o acesso remoto, não necessitando que o projetista esteja fisicamente no local da indústria para que se possa criar, corrigir ou alterar algum projeto, economizando tempo e, em casos extremos, até a própria alocação do funcionário no ambiente industrial.
Os menus padronizados e auto-explicativos, facilitam muito a utilização do sistema, que traz uma curva de aprendizagem extremamente altatypeset@protect @@footnote SF@gobble@opt Baseado em testes realizados pelos criadores do programa com pessoas com e sem conhecimentos do ambiente de desenvolvimentos de projetos industriais. . Sendo assim, a qualidade dos planos de processo e de operações são mais consistentes, pois dependem menos do conhecimento do processista/projetista.
O sistema pode ser acessado pelo endereço http://WebCAPP.graco.unb.br.
Tabelas de decisão podem ser facilmente implementadas num computador. Entretanto, quando sistemas de CAPP as usam é necessário um programa de pré-processamento para implementar a tabela e controlar a operação da tabela. Tal software é chamado de linguagem de tabela de decisão. Este software consiste de uma tabela de decisão e um programa externo.
A tabela de decisão é representada no seu formato original, podendo trabalhar com uma tabela de decisão a partir da representação através de árvore de decisão e vice-versa. A figura 7.5 apresenta uma representação através de árvore de decisão e tabela de decisão.
O programa externo é utilizado para controlar a tabela de decisão.
Chamando este exemplo de DCTABLE, uma sub-rotina (TAB(N)) avalia a
tabela N. Durante ou após a análise da tabela, um TAB(N![]() )
pode ser adicionado à tabela N, que significa que várias tabelas podem
ser conectadas. Para a consulta à tabela para seleção de um processo
ou operação de usinagem pode-se utilizar como dados de entrada a forma,
diâmetro, tolerância de posição e tolerância dimensional.
)
pode ser adicionado à tabela N, que significa que várias tabelas podem
ser conectadas. Para a consulta à tabela para seleção de um processo
ou operação de usinagem pode-se utilizar como dados de entrada a forma,
diâmetro, tolerância de posição e tolerância dimensional.
Uma outra forma de implementar um processo de lógica de decisão baseado na abordagem de tabela de decisão é utilizar a tecnologia de base de dados relacionais. Existem diversos sistema de gerenciamento de bases de dados relacional gratuitos e que podem ser usados para esta finalidade como o MSQL e o MySQL (ftp://custom.lab.unb.br/pub/database), tanto para plataforma Unix como Windows, como apresentado na seção anterior.
Ferramentas emergentes de Inteligência Artificial (AI) como redes neurais, lógica difusa, algoritmos genéticos, sistemas especialistas, etc, oferecem novas oportunidades e abordagens para resólver complexos problemas associados a elaboração automática de planos de processo (DÉPINCÉ, AMARA e HASCOËT, 1999). A maioria dos métodos utilizados na pesquisas de CAPP são baseados em lógica difusa ou um mix de métodos usando redes neurais, lógica difusa e sistemas especialistas. Algumas aplicações de algoritmos genéticos podem ser achadas. Atualmente as técnica de AI são usadas em funções específicas como seleção de ferramentas de corte, seqüenciamento das operações, reconhecimento de padrões, etc.
O uso de técnicas de AI em planejamento do processo tem destacado a necessidade de se ter a ferramenta certa aplicada no domínio do problema. Algumas técnicas como algoritmos genéticos ou lógica difusa podem tratar com planos de processos contendo alternativas gerando planos de processo não lineares. Os próximo desenvolvimento de sistema de CAPP é a integração de técnicas de AI dentro do campo de inteligência artificial distribuído, como em um arquitetura computacional baseada em Agentes (DÉPINCÉ, AMARA e HASCOËT, 1999). Neste caso as atividades são distribuídas através de múltiplos resolvedores de problemas especializados, ou seja o Agente.
HASHMI et al. (1998) desenvolveu uma aplicação para seleção das condições de usinagem utilizando-se da abordagem baseada em lógica difusa. No modelo fuzzy desenvolvido dados de materiais (dureza) são os dados de entrada e a velocidade de corte é a variável de saída. Um conjunto fuzzy para a variável fuzzy de entrada (Dureza) e para a variável fuzzy de saída (Velocidade) são utilizados, consistindo de dados de três diferentes profundidades de corte, quatro tipos de ferramentas e dois tipos de materiais com durezas distintas e as faixas de velocidade de corte recomendadas para cada material.
À variável fuzzy Dureza é associado ao seguinte conjunto fuzzy: muito mole, mole, médio, médio superior, duro e muito duro.
A variável fuzzy Velocidade é associado ao conjunto fuzzy: muito baixa, baixa, média baixa, média alta, alta e muito alta.
A regras no total de seis são estabelecidas, como: ``Se dureza do material é muito mole, então a velocidade é muito alta''.
Um forma triangular foi empregada para descrever o conjunto fuzzy. HASHMI et al. (1998) conclui o estudo indicando que existe uma boa correlação entre os dados utilizados de velocidade de corte recomendados pelo Machining Data Handbook e os valores de velocidade previstos pelo modelo em fuzzy logic.
Desde 1995, uma nova abordagem tem despontado no planejamento do processo: inteligência artificial distribuída (DAI). O uso de sistemas distribuídos tem mostrado que a inteligência distribuída melhora a eficiência do processo de decisão. Em sistemas distribuídos, também chamados de sistemas cooperativos, o problema original é decomposto em sub-problemas e cada sub-sistema especialista é responsável por uma tarefa específica. Em um único sistema, diferentes fontes de conhecimento coexistem e DAI permite o gerenciamento evitando os conflitos devido às várias formas de representação de conhecimento utilizadas. No final as soluções parciais criadas pelos sub-sistemas são colocadas juntas, de forma ordenada, para obter uma solução global. As características de um sistema cooperativo são:
Outra vantagem de técnicas de DAI é a possibilidade de integrar o usuário na malha de decisão: de maneira a controlar e disparar os subsistemas especialistas por meio de três maneiras: orientado ao usuário, orientado pelo cenário e disparo automatizado.
Em DÉPINCÉ et al. (1999) é apresentado uma arquitetura para CAPP generativo baseada na representação multi-agentes. MAS distribui as atividades de planejamento do processo para múltiplos agentes especializados e coordena-os de maneira a obter a solução global. O uso de MAS tem mostrado que a inteligência distribuída melhora a eficiência do processo de decisão, sendo que cada agente tem tem seu próprio conhecimento e é responsável por uma tarefa específica. Um agente é uma entidade que pode atuar em um ambiente, comunicar-se com outros agentes e cujo o comportamento é resultado de suas observações, conhecimento e interação com outros agentes. Um agente pode ser usado para o modelo de dados (máquinas, ferramentas, dispositivos, etc), como um supervisor, funções matemáticas ou um humano.
A arquitetura proposta é composta por três módulos:
O planejamento dos processos de fabricação tem uma característica bastante peculiar: não existe um algoritmo predefinido para a geração dos planos de processo. Assim, se faz necessária a utilização de uma metodologia de programação especialmente voltada para a solução de problemas desta natureza. A tecnologia de sistemas especialistas se apresenta como uma alternativa bastante atrativa.
A utilização de sistemas especialistas de forma comercial é bastante recente (teve seu começo na década de 80), mas, de acordo com WATERMAN (1986), pesquisas são desenvolvidas desde a década de 60. Os sistemas especialistas constituem um ramo importante da inteligência artificial. Nos tópicos que seguem apresenta-se uma introdução à teoria de sistemas especialistas.
De acordo com a definição apresentada em GIARRATANO e RILEY (1994) sistemas especialistas são programas de computador que se utilizam de conhecimento e procedimentos de inferência para resolver problemas bastante complexos que necessitam, para a sua solução, de um conhecimento bastante específico.
Neste sentido, pode-se dizer que sistemas especialistas são softwares que procuram imitar a forma de raciocínio de um especialista no assunto, para a solução de um determinado problema.
Pelo fato dos sistemas especialistas se utilizarem de uma base de conhecimento para a solução de problemas, os termos sistemas baseados no conhecimento e sistemas especialistas baseados no conhecimento são muitas vezes utilizados como sinônimos de sistemas especialistas, embora não restrinjam o conhecimento utilizado ao obtido de um especialista no assunto. Assim, o termo sistema especialista é utilizado, atualmente, para se referir aos sistemas baseados em conhecimento, mesmo que este tenha sido obtido a partir de livros e revistas que lidam com o assunto em questão.
Como apresentado em WATERMAN (1986), os sistemas especialistas são constituídos por duas partes distintas, quais sejam:
Diferentes formas podem ser utilizadas para representar uma base de conhecimento. A seguir, apresenta-se a forma mais comum de representar as partes estática e dinâmica de uma base de conhecimento:
O novo fato ``Deve haver uma operação de furação'' é gerado, pela regra acima, quando o fato ``A peça tem um furo'' estiver presente na base de fatos. Aos fatos que servem de base para o disparo de uma dada regra dá-se o nome de premissa da regra, aos que são gerados quando a regra é executada dá-se o nome de conclusão da regra.
Uma forma mais recente e bastante eficiente, apresentada por GIARRATANO e RILEY (1994), de se representar o conhecimento é a utilização de classes para modelar um sistema. Neste tipo de representação, os fatos são substituídos pelos atributos dos objetos de cada classe. As regras (conhecimento dinâmico) passam então a atuar sobre os atributos dos objetos. O novo modelo seria assim representado:
![]() Se
Se
existe um objeto da classe furo com:
Diâmetro = D
Profundidade = P
![]() Então
Então
associe ao atributo Operações deste objeto uma operação de Furar com Diâmetro = D e Profundidade = P.
O funcionamento de um sistema especialista depende da forma como é utilizado. Pode-se utilizar um sistema especialista como um sistema simulador ou como um sistema que analisa a veracidade de hipóteses.
Quando utilizado como um simulador tem-se o que se chama de encadeamento para frente (forward chaining). Quando utilizado para analisar a veracidade de hipóteses tem-se o que se chama de encadeamento para trás (backward chaining).
O encadeamento para frente é adequado para determinar quais são as conseqüências de um dado fato ocorrido em um dado sistema.
Seu funcionamento pode ser descrito com base nas relações existentes entre os elementos que o constituem. O interpretador fica continuamente monitorando a base de fatos e a base de regras com o objetivo de construir uma lista (agenda) das regras que têm suas premissas satisfeitas pelos fatos já existentes. Uma regra que seja colocada no topo da agenda será a primeira a ser executada. A ordem em que as regras são colocadas na agenda e a sua execução são ditadas pela estratégia adotada pelo controlador.
Dentre as estratégias comumente utilizadas por um controlador pode-se citar: execução em largura e em profundidade.
Suponhamos que duas regras R1 e R2 tenham suas premissas satisfeitas por um fato A, presente na base de fatos. Estas regras são então colocadas na agenda. A execução da regra R1 leva à criação do fato B, que satisfaz à regras R3 e R4. Estas regras (R3 e R4) são agora colocadas na agenda. Se R3 e R4 são colocadas acima de R2, então tem-se uma execução em profundidade. Se R3 e R4 são colocadas depois de R2, então tem-se uma execução em largura.
O encadeamento para trás é adequado para determinar quais são as causas que levaram a um dado fato, em um dado sistema, ou simplesmente para verificar se uma determinada hipótese se sustenta, com base nos fatos já conhecidos.
Neste caso as relações entre os elementos que constituem o sistema especialista são diferentes daquelas presentes no encadeamento para frente. O interpretador recebe um fato (uma hipótese que deve ser provada) e verifica se este já existe na base de fatos. Se sim, então a hipótese é imediatamente provada. Se não, então o interpretador verifica na base de regras quais as regras que têm como conclusão aquele fato. Os fatos que estão nas premissas dessas regras passam então, a ser hipóteses intermediárias que devem ser provadas. O processo se encerra quando um fato presente na base de fatos dá suporte ao raciocínio desenvolvido, ou quando não há mais caminhos para tentar provar a hipótese.
Por exemplo, deseja-se verificar se a hipótese H0 pode ser provada com base nos fatos já existentes (fig. 7.6). De acordo com a base de regras, se um dos fatos H1, H2 ou H3 for verdade então H0 será provada. Procura-se então provar pelo menos uma das hipóteses intermediárias H1, H2 ou H3.
Para que H1 seja provada é necessário que o fato A exista, o que, neste caso não acontece. Então este caminho não prova a hipótese inicial (H0).
Para que H2 seja provada é necessário que as duas hipóteses intermediárias (H4 e H5) sejam simultaneamente provadas. Para que H4 seja provada é necessário que exista o fato B, o que realmente acontece, e portanto H4 é verdade. Mas ainda resta provar H5, que depende da existência dos fatos C e D. Embora exista o fato D, o fato C não está presente e portanto H5 não pode ser provada. Assim H2 também não pode ser provada e novamente tem-se um caminho que não prova a hipótese inicial (H0).
Resta então tentar provar H3. Para que H3 seja provada é necessário que a nova hipótese intermediária H6 seja provada. Para que H6 seja provada é necessário que existam simultaneamente dois fatos: D e E. Os fatos D e E estão presentes na base de fatos e conseqüentemente H6 é verdade. Sendo H6 uma verdade, H3 também o é, e segue-se que a hipótese inicial (H0) é verdadeira.
Sistemas especialistas são indicados para resolver problemas que não tenham solução algorítmica, quando se consegue expressar o conhecimento sobre o sistema através de regras. Sendo assim, os sistemas especialistas se diferem dos sistemas convencionais em um ponto básico: o controle sobre o fluxo de execução. Os sistemas convencionais apresentam uma programação procedural, onde a seqüência de execução é um aspecto importante que deve ser previamente definido. Já nos sistemas especialistas não há uma preocupação, por parte do construtor do sistema, com a seqüência de execução, pois esta é indiretamente definida através das regras e dos fatos presentes no sistema.
Os sistemas especialistas são dependentes de uma base de conhecimento criada a partir das regras. A criação de bases de conhecimento para um domínio amplo hoje ainda não é uma realidade, devido às dificuldades encontradas em se aglomerar e manipular diferentes áreas de conhecimento. O caminho mais utilizado, atualmente, é a construção de bases de conhecimento para um domínio bastante restrito.
Desta forma, o campo de aplicação dos sistemas especialistas passa a ser o dos sistemas com domínios reduzidos sobre os quais se pode expressar o conhecimento na forma de regras, quando um algoritmo não é adequado ou simplesmente não existe para a solução do problema.
Os sistemas especialistas apresentam uma série de características positivas, dentre as quais pode-se citar:
O conhecimento em ES deve ser representado num computador numa forma implementável. A representação do conhecimento é uma combinação de estruturas de dados e rotinas interpretativas. Esquemas de representação são classificados em declarativos e procedurais (WANG e LI, 1991).
WHEN <premissa> BEGIN <ação>. . É a forma de representação conhecimento utilizada em ES, como descrito anteriormente.
Ferramentas de SE como CLIPS, FUZZYCLIPS podem ser encontradas em: ftp://omega.enm.unb.br/pub/doutorado/ disco2/www.ghg.net/clips. A mesma ferramenta foi portada para Java sendo denominada Jess , ftp://omega.enm.unb.br/pub/doutorado/ disco2/herzberg.ca.sandia.gov/jess/sourcedist.
Em http://herzberg.ca.sandia.gov/jess/demo.html pode-se executar um applet java de um sistema especialista denominado ``Sticks Game''.
Outra aplicação utilizando FuzzyClips e Jess usando a abordagem java applet pode ser acessada na URL http://ai.iit.nrc.ca/IR_public/fuzzy/fuzzyShower.html, onde um applet controla a temperatura d'água de um chuveiro utilizando regras de produção associado à lógica fuzzy.
Pode-se utilizar Jess, no lado do servidor, através de Servlets. Existem outras APIs desenvolvidas para Jess que podem ser acrescentadas ao sistema aumentando a sua funcionalidade. Maiores informações estão disponíveis em http://herzberg.ca.sandia.gov/jess/.
Agentes são metáforas computacionais para um tipo de componente de software que em seu funcionamento pretende imitar o comportamento de seres humanos no tocante a diversas ca-racterísticas, particularmente no que se refere a um comportamento independente e inteligente. Apesar dessa idéia geral, diversas definições de agentes podem ser encontradas na literatura. WOOLDRIDGE e JENNINGS (Wooldrige, 1995) apresentam duas propostas de definição de agentes, no que chamam de noção forte e noção fraca, dependendo do grau de "realismo" com que se pretende entender a metáfora de agente.
Segundo WOOLDRIDGE e JENNINGS (Wooldridge, 1995), uma noção fraca do termo agente é aquela que o utiliza para denotar qualquer hardware ou sistema de computação baseado em software, que apresente as seguintes propriedades:
Para alguns pesquisadores, particularmente aqueles que trabalham na área da Inteligência Artificial, o termo agente deve ter um significado mais específico que o adotado pela noção fraca. Em sentido geral, estes pesquisadores descrevem um agente como um sistema de computação que, além de apresentar as propriedades identificadas na noção fraca, deve ser definido ou implementado utilizando-se conceitos que usualmente são aplicáveis aos seres humanos. Por exemplo, é bastante comum na Inteligência Artificial caracterizar os agentes usando noções aplicáveis à mente humana, tais como conhecimentos, crenças, intenções e obrigações.
Em algumas ocasiões, outros atributos são discutidos no contexto de agentes. Como exemplo, temos:
Um tópico importante relacionado à tecnologia de agentes diz respeito às diferentes arquiteturas que podem ser idealizadas para a implementação de agentes. Entende-se por uma arquitetura de agentes como o conjunto de especificações e técnicas utilizadas para a definição funcional dos agentes. Nesta seção, descreveremos alguns dos conceitos relacionados a arquiteturas de agentes. Primeiramente daremos duas definições extraídas do trabalho de WOOLDRIDGE e JENNINGS (WOOLDRIDGE, 1995).
Maes define uma arquitetura de agentes como: "Uma metodologia particular para a construção de agentes. Especifica como os agentes podem ser decompostos na construção de um conjunto de módulos (componentes) e como estes módulos podem interagir entre si. O conjunto total de módulos e suas interações deve especificar como os dados dos sensores e o estado interno do agente serão utilizados para determinar as ações realizadas pelo agente... e seu futuro estado interno. Uma arquitetura envolve técnicas e algoritmos que suportem esta metodologia."
Kaelbling considera uma arquitetura de agentes como: "Uma coleção específica de módulos de software (ou hardware), tipicamente designados por caixas com setas que indicam os dados e o fluxo de controle entre os módulos.
Pode-se definir um agente deliberativo ou arquitetura deliberativa de agente, como um agente que contenha uma representação explícita de um modelo simbólico do mundo. Neste, as decisões (por exemplo, as ações a serem executadas) são determinadas através de um raciocínio lógico (ou pelo menos pseudo-lógico), baseado em padrões de "matching" e manipulação simbólica. A idéia de agentes deliberativos baseados puramente em um raciocínio lógico é extremamente tentadora. Para fazer com que o agente esteja de acordo com alguma teoria de agentes, poderíamos ingenuamente supor que é suficiente dar-lhe uma representação lógica desta teoria e fazer com que o agente realize alguma prova de teorema. Se tratarmos de construir um agente por esta via, teríamos pelo menos dois problemas importantes a serem resolvidos:
Desde o início dos anos 70, os adeptos da abordagem "planning" dentro da Inteligência Artificial estiveram estreitamente preocupados com o design de agentes artificiais. De fato, parece razoável dizer que a maioria das inovações no design de agentes vem desta comunidade. Determinar planos é essencialmente uma tarefa de programação automática: verificar se uma ação (ou conjunto de ações), quando executada(s), vai resultar na obtenção de algum objetivo desejado. Dentro da comunidade da Inteligência Artificial Simbólica, existe a predisposição em aceitar que qualquer agente artificial deve possuir algum tipo de sistema de planejamento como componente central. Talvez o mais conhecido sistema planejador seja o STRIPS.
Este sistema assume uma descrição simbólica do mundo, do objetivo desejado, e um conjunto de ações, caracterizadas por suas pré-condições e pós-condições associadas. O STRIPS tenta encontrar uma seqüência de ações que possa levar ao sucesso de alguma meta, usando uma análise simples de verificação de sucesso (simple means-ends analysis). Esta análise envolve essencialmente um matching das pós-condições das ações com o objetivo desejado. O algoritmo de planejamento STRIPS era muito simples e teve sua ineficiência comprovada para problemas com complexidade moderada. Outras técnicas foram desenvolvidas para melhorar este algoritmo, tais como os planejadores não lineares e os planejadores hierárquicos. Porém em meados dos anos 80, alguns resultados teóricos mostravam que essas técnicas de refinamento poderiam não ser úteis em qualquer sistema de tempo restrito. Apesar destas dificuldades, várias tentativas têm sido realizadas para construir agentes nos quais o componente primário é um algoritmo planejador. Os resultados obtidos nesta área tiveram uma profunda influência sobre as pesquisas posteriores feitas sobre os algoritmos planejadores. Talvez mais do que qualquer outra coisa, os fracassos obtidos tenham levado alguns dos pesquisadores a questionarem, em sua totalidade, o paradigma da Inteligência Artificial Simbólica, e por conseguinte conduzido-os a trabalhar com enfoques alternativos que serão apresentados a seguir.
A rejeição e o questionamento da viabilidade do paradigma da Inteligência Artificial Simbólica conduziu ao que geralmente é conhecido como sendo as arquiteturas reativas. Estas não incluem nenhum tipo de modelo simbólico central do mundo e não utilizam raciocínio simbólico complexo.
WOLDRIDGE e JENNINGS (WOOLDRIDGE, 1995) consideram Rodney Brooks, pesquisador do MIT, como um dos principais críticos da noção de agência da Inteligência Artificial Simbólica, motivado pelas deficiências dos enfoques da Inteligência Artificial para cons-truir mecanismos de controle para robôs móveis autônomos. BROOKS (1986) resumiu uma arquitetura alternativa para cons-truir agentes, chamada de arquitetura da suposição (subsumption architecture). Ele propôs em trabalhos posteriores (BROOKS, 1990, 1991a e 1991b) três teses chaves:
Muitos pesquisadores sugeriram que nem um enfoque completamente deliberativo, nem um completamente reativo é apropriado para a construção de agentes. Discute-se então, o caso dos sistemas híbridos, abordagem que associa ambos enfoques.
Um enfoque óbvio é construir um agente com dois (ou mais) sub-sistemas, um deles deliberativo (que contenha um modelo simbólico do mundo, desenvolva planos e tome decisões) e outro reativo (que seja capaz de reagir aos eventos que ocorrem no ambiente sem envolver raciocínios complexos).
Com freqüência o componente reativo é colocado com algum tipo de precedência sobre o componente deliberativo. Desta forma, ele pode oferecer uma resposta rápida a eventos importantes do ambiente. Este tipo de estrutura leva naturalmente à idéia de uma arquitetura em camadas. Nesta arquitetura, os sub-sistemas de controle de agentes são organizados dentro de uma hierarquia, na qual as camadas mais altas lidam com as informações em níveis crescentes de abstração. Assim, por exemplo, as camadas mais baixas poderiam mapear diretamente os dados dos sensores para as saídas dos atuadores sem nenhum tratamento prévio, enquanto as camadas superiores fazem o tratamento das tarefas de longo prazo. O principal problema nesta arquitetura é que o tipo de estrutura de controle deverá ser embutida nos sub-sistemas de agentes para manipular as interações entre as diferentes camadas.
Dois bons exemplos desta arquitetura são as máquinas de Touring desenvolvidas por Ferguson e descritas por WOOLDRIDGE e JENNINGS (WOOLDRIDGE. 1995) e InteRRaP, figura 7.7, (BRENNER, 1998). Outro exemplo das arquiteturas híbridas é o Procedural Reasoning System (PRS).
Existem diferentes critérios para a classificação de agentes. Por exemplo, os agentes podem ser classificados por sua mobilidade, ou seja, sua habilidade em mover-se por diferentes nós de uma rede. Segundo este conceito os agentes podem ser classificados como agentes estáticos ou agentes móveis. Outra possível classificação pode ser feita segundo sua arquitetura. Assim, eles poderiam ser classificados como deliberativos ou reativos (também conhecidos na literatura como reflexivos).
Os agentes também podem ser classificados segundo os diferentes atributos que possam idealmente exibir. Neste sentido, HYACINTH NWANA (NWANA, 1996a, 1996b e1998), em seus trabalhos, descreve uma classificação prática dos agentes (baseado em alguns casos no que são os agentes, e outros no papel que eles executam), resultando na seguinte classificação:
Outra classificação dos agentes que pode ser colocada é a seguinte:
Com o desenvolvimento da tecnologia de agentes, uma grande variedade de ferramentas de software encontram-se disponíveis para o design e construção de sistemas baseados em agentes. O número emergente de protótipos de linguagens de agentes é um sinal de que a tecnologia de agentes está sendo amplamente utilizada e que muitas aplicações baseadas em agentes estão sendo desenvolvidas.
WOOLDRIDGE e JENNINGS (WOOLDRIDGE, 1995) escreveram a respeito: "por uma linguagem de agente, entendemos um sistema que nos permita programar hardware ou software de sistemas de computação em termos de alguns dos conceitos desenvolvidos pelos teóricos de agentes. Como mínimo, esperamos que tal linguagem inclua alguma estrutura correspondente a um agente"
Como a questão "O que é um agente?" é muito polêmica e não existe um consenso (e possivelmente nunca exista) com respeito a esta questão, alguns pesquisadores consideram uma linguagem como linguagem de agentes e outros podem não considerá-la da mesma maneira O que é certo, é que elas prestam-se em diferentes graus para diferentes tipos de definições e aplicações de agentes.
A tabela 7.1 apresenta algumas linguagens para o desenvolvimento
de diferentes aplicações baseadas em agentes. Nesta tabela não são
apresentadas linguagens apropriadas para o desenvolvimento de sistemas
multi-agentes cooperativos/''colaborativos'', visto que em geral,
os agentes cooperativos/''colaborativos'' são muito mais complexos
que os agentes de interface, de informação ou móveis. Além de linguagens,
eles precisam de arquiteturas ou plataformas para sua construção.
Como alternativa eles podem ser construídos completamente usando alguma
linguagem de terceira geração, como é o caso do C++, Java, Smalltalk
ou Prolog.
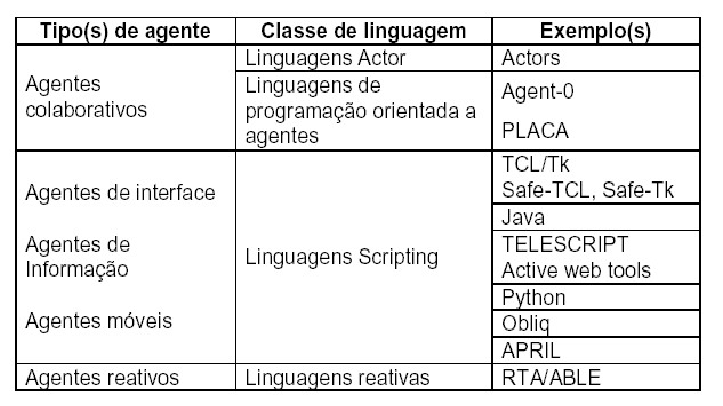 |
Até agora temos utilizado a terminologia "linguagem de agentes" para referenciar a linguagem utilizada na criação dos agentes. É importante destacar que existe um outro enfoque para esta terminologia, onde utiliza-se "linguagem de agentes" para referenciar a linguagem que dois ou mais agentes utilizam para comunicar-se entre si, quando interagindo em um ambiente comum. Esta terminologia é usual dentro do contexto de sistemas multi-agentes, sendo que as "linguagens de agentes" são utilizadas para o intercâmbio de conhecimento a ser compartilhado entre os agentes que cooperam/colaboram em sistemas deste tipo. Dois tipos de linguagens de agentes são destacados na literatura (NWANA, 1996d): as chamadas Linguagem de Comunicação de Agentes (ACL ) e as chamadas Linguagens de Conteúdo (CL ).
As ACL são utilizadas para deixar explícito o ato comunicativo relacionado à mensagem, ou seja, destaca-se o ato comunicativo pretendido pelo agente quando de sua comunicação com seu interlocutor. Alguns exemplos desta linguagem são o KQML (Knowledge Query and Manipulation Language) e o FIPA-ACL (Foundation for Intelligent Physical Agents - Agents Comunication Language).
As CL, por sua vez, são utilizadas para expressar o conhecimento que se deseja compartilhar com o destinatário da mensagem. Exemplos de linguagens deste tipo são o KIF (Knowledge Interchange Format), FIPA-CLL (FIPA Content Language Library), FIPA-SL (FIPA Semantic Language), FIPA-RDF (FIPA Resource Description Framework), FIPA-CCL (FIPA Constraint Choice Language) e o FIPA-KIF (FIPA Knowledge Interchange Format).
A engenharia de software baseada em agente é com freqüência comparada à programação orientada a objetos, em que os agentes, assim como os objetos, compartilham algumas propriedades tais como: encapsulamento, herança (com certa freqüência) e fornecem uma interface baseada em mensagens para suas estruturas de dados internas e seus métodos (ou algoritmos). Embora exista uma distinção importante: na programação orientada a objetos, o significado de uma mensagem pode ser diferente de um objeto para outro (princípio do polimorfismo). Na engenharia de software baseada em agentes, os agentes utilizam uma linguagem comum, que tem uma semântica independente dos agentes, ou seja, os agentes devem ter uma linguagem de comunicação (ACL) comum de modo que todos possam se entender.
Outra diferença entre objetos e agentes é que um objeto tem uma postura passiva diante do mundo. Ou seja, um objeto é uma entidade do mundo que somente recebe mensagens, efetuando um comportamento em resposta a elas. Por outro lado, um agente tem uma postura ativa, ou seja, é uma entidade do mundo que possui um ciclo de vida e que durante esse ciclo de vida estará adquirindo continuamente informações do mundo, através da busca ativa por mensagens que se encontrem no ambiente em que está inserido.
As semelhanças que tem os objetos e os agentes, possibilitam que algumas linguagens orientadas a objetos, tais como, Smalltalk, C++ ou Java se prestem para a construção de sistemas de agentes.
Agentes podem ser integrados a sistemas de software na forma de componentes especialmente desenvolvidos para operar de maneira pró-ativa e contínua. Desta forma, pode-se adotar as mesmas metodologias de projeto de software utilizadas, por exemplo, em sistemas orientados a objetos, com apenas pequenas modificações. Essas modificações ocorrem principalmente na fase de design, durante a atribuição de funcionalidades (responsabilidades) aos componentes de software. Nesse instante, ao invés de se projetar um componente na forma de um autômato (ou seja, um grupo de objetos trocando mensagens entre si, o que seria natural na metodologia orientada a objetos), utiliza-se a metáfora de um agente. Nesse caso, o design do componente-agente passará por etapas de definição das responsabilidades do agente (sua motivação - geratriz do comportamento pró-ativo), e ciclo de vida. A atribuição de uma motivação a um agente não é uma tarefa trivial, sendo atualmente fonte de inspiração para toda uma área de pesquisas dentro do tema "sistemas inteligentes".
Uma possível metodologia para o design de um agente, que poderia metaforicamente estar associada ao design da "mente" do agente vem sendo pesquisada no DCA-FEEC-UNICAMP, sendo chamada de "Síntese Semiótica" (GUDWIN, 2001). Essa abordagem modela todo o funcionamento dos agentes como um processo de processamento de signos, desde os signos icônicos, mais voltados para os dados sensoriais e criações de modelos representacionais para esses dados, até signos indiciais, que nos remetem a outros signos e símbolos, que podem ter sua semântica atribuída por meio de aprendizado. A semiótica é a disciplina que estuda os diferentes tipos de signos e seu possível processamento. Assim, utilizando a síntese semiótica, cria-se uma metodologia de design para agentes, permitindo sua integração a um projeto de software.
A utilização de uma arquitetura baseada em sistemas multi-agentes (MAS) é sem dúvida a mais atrativa atualmente, principalmente devido a evolução dos sistemas computacionais em especial de Unix para computadores pessoais e a utilização de redes de comunicação baseadas no protocolo TCP/IP em uma arquitetura cliente/servidor.
Desta forma pode-se utilizar diversos tipos de agentes trabalhando cooperativamente e de forma distribuída na resolução dos diversos problemas associados ao planejamento do processo. Por exemplo, pode-se utilizar um sistema de gerenciamento de base de dados relacional (MySQL® ou SQL®) para compartilhar as informações dos recursos disponíveis de manufatura (máquinas, ferramentas, informações de materiais, dispositivos de fixação, etc) e ter os agentes como os resolvedores das atividades de planejamento do processo. Os agentes podem ser implementados utilizando diversas abordagens na sua lógica de decisão: sistemas especialistas baseado em regras de produção, lógica difusa, redes neurais, tabelas de decisão, entre outros.
Pode-se utilizar a linguagem de comunicação de agentes KQML ou FIPA-ACL como linguagem que os agentes usam para se comunicar. Por exemplo, o sistema Cybercut utiliza o KQML como linguagem de comunicação. A figura 7.14 apresenta a arquitetura de agentes utilizada pelo sistema Cybercut, que pode ser tomada como referência para o trabalho de doutorado.
Cybercut foi concebido em um ambiente em rede de agentes de softwares inter-operáveis denominado de Manufacturing Agent Community (MAC). A figura 7.14 apresenta a arquitetura MAC que pode ser estratificada em três partes. No nível superior reside um grupo de Agentes de Projeto, o quais atuam como ferramentas CAD e também permite aos usuários que se conectem aos níveis inferiores. O nível intermediário consiste de Agentes de Planejamento. Este grupo de agentes interpreta as definições de projeto, modelagem geométrica, realizada pelo usuário, e determina como fabricar a peça usando o Agente de fabricação selecionado, o qual reside no nível inferior. É utilizado uma interface transparente entre o projeto, planejamento e fabricação.
A partir deste fluxo de informações entre os três níveis da arquitetura é necessário realizar o encapsulamento destas informações, sendo adotado o Knowledge Query and Manipulation Language (KQML) como padrão de linguagem de mensagens entre os agentes. KQML contém informações sobre quais agentes enviam mensagem, onde eles estão, como interpretar a mensagem recebida pelo destinatário. As mensagens são trocadas usando conexões sockets diretas entre os agentes.
Foi utilizado a ferramenta computacional JATLite (Java Agent Template Lite). JATLite é um pacote de programas escritos em Java que permite aos usuários a criação de agentes de softwares que comunica-se de forma robusta na Internet. Esta ferramenta pode ser obtida gratuitamente na URL http://java.stanford.edu/index.html. JATLite oferece uma infra-estrutura básica na qual agentes registrados com um Agent Message Router (AMR) usam um nome e um password, conectando-se e desconectando-se da Internet, mandando e recebendo mensagens, transferindo arquivos com FTP, e geralmente trocando informações com outros agentes através dos vários computadores onde eles estão sendo executados. A figura 7.15 apresenta o sistema JATLite. Este ferramenta foi utilizado na implementação do CyberCut. O protocolo de mensagem compartilhado utilizado é o KQML. JATLite permite o desenvolvimento de uma infra-estrutura para Typed-Message Agents, definido nos termos de uma comunidade de agentes. Maiores informações sobre KQML e sistemas desenvolvidos utilizando-se a arquitetura de agentes podem ser encontradas na URL http://www.cs.umbc.edu/kqml. Uma abordagem interessante utilizando o kernel de sistema especialista JESS (Clips portado para Java), KQML e JATLite é descrito na URL http://cdr.stanford.edu/ petrie/jat/CooplS99-paper.pdf. JESS foi empacotado junto com JATLite para produzir agentes inteligentes baseados em Java e regras.
Com o intuito de viabilizar o desenvolvimento das atividades definidas no plano de doutorado foi necessário implantar uma infra-estrutura computacional mínima no laboratório do Grima através da instalação e configuração de uma estação de trabalho baseado no sistema operacional Linux para arquitetura 386. Desta forma foi feita a instalação de uma distribuição Linux em um computador Pentium III e configurado uma série de serviços (ftp, http, ssh, mysql, tomcat servelets, xdm, lpd) para trabalharem em uma arquitetura cliente/servidor e que serão utilizados no desenvolvimento da tese. Isto foi realizado durante na disciplina de estudo dirigido cursada no terceiro período de 2001.
Foi feita uma especificação de computadores para serem utilizados como estações de trabalho utilizando o sistema operacional Linux e que formarão um cluster de máquinas para trabalharem com processamento paralelo, compartilhando o uso de processadores e memória, utilizando a arquitetura MOSIX cluster (ftp://custom.lab.unb.br/pub/cluster/mosix). Esta atividade ainda não foi implementada, pois aguardasse a chegada dos computadores recentemente adquiridos.
Foi instalado uma série de aplicações voltadas para desenvolvimento de sistemas e que poderão ser utilizadas no desenvolvimento do trabalho de doutoramento nas estações de trabalho Linux, como:
Muitas das atividades desenvolvidas nos computadores do Grima são executadas utilizando-se de conexão remota através de aplicações de login remoto como o protocolo telnet (user interface to the TELNET protocol) e o ssh (OpenSSH SSH client - remote login program). Estas aplicações permitem emular um console virtual e ``logar'' remotamente nas máquinas realizando o trabalho a distância.
Também é utilizado o sistema XDM (X Display Manager with support for XDMCP, host chooser) para conexão remota utilizando janela/display gráfico a fim de executar programas que necessitem de um servidor gráfico X (X - a portable, network-transparent window system). Através do xdm utiliza-se remotamente, em Florianópolis, aplicações CAD/CAM (SmartCam e AutoCad) disponíveis no Laboratório do Graco em Brasília. Foi também instalado um servidor METAFRAME XP (Citrix) para plataforma Windows Advanced Server 2000, disponibilizado seu acessso através da Web por meio da URL http://laplace.lmp.ufsc.br e através de clientes ICA para Windows e Unix.
A utilização do ambiente Unix é sem dúvida um grande facilitador para trabalhos cooperativos e a distância pois permite uma utilização transparente dos recursos de rede TCP/IP em uma arquitetura cliente/servidor, nativa em plataforma Unix, desde a sua concepção, ou seja, são na-turalmente orientados para aplicações em rede. Outra grande vantagem é a utilização de software open source e normalmente gratuitos. Todos os softwares instalados nos servidores e que serão utilizados nas atividades de doutoramento são open source ou gratuitos.
Está sendo construído um sistema de pan-tilt para posicionamento de uma câmera de vídeo seme-lhante ao sistema RobWebCam desenvolvido na UnB/Graco (http://graco.unb.br/robwebcam). Este sistema será utilizado como Webcam, para captura de vídeo e imagem do processo de usinagem remoto. Esta atividade está sendo desenvolvida por estagiários do Grima.
Com relação ao torno CNC da Romi, disponível no laboratório de usinagem, que poderá ser utilizado no trabalho de implementação do sistema de teleoperação foi constatado alguns problemas associados a versão do CNC utilizada na máquina. Este CNC não tem implementado um protocolo de comunicação DNC, apresenta apenas funções associadas a download e upload de arquivos de NC em formato ASCII. Após consulta ao fabricante do conjunto máquina-ferramenta/CNC, Indústrias Romi, foi obtida a seguinte posição:
Para o comando Mach 9 somente é possível fazer download e upload de programas de usinagem via RS232 .
Para os comandos Mach 6 e Fanuc 18i existe o protocolo DNC2 que é baseado no protocolo LSV2 usado por vários fabricantes de CNC na Europa. Este protocolo utiliza a interface RS232 para comunicação, podendo utilizar a interface RS422 para melhorar a velocidade de transmissão.
Este protocolo pode ser usado somente de um único PC para uma única máquina. Não pode ser usado de um único PC para várias máquinas.
Com o protocolo DNC2 é possível fazer:
O DNC-2 não é opcional nas máquinas Romi e sim uma execução especial, um acessório. Assim sendo é necessário solicitar a instalação deste opcional na máquina disponível na UFSC, o que já se está tentando viabilizar através de projetos de pesquisa submetidos à agências de fomento. Esta é uma das prioridades em termos de compra de equipamentos para o trabalho de doutoramento. Na Universidade de Brasília, o Grupo de Automação e Controle (Graco) está adquirindo um Centro de Torneamento Galaxy 15M da Romi com comando GE-Fanuc 18i-TA. Outra opção é utilizar um torno CNC da SOCIESC de Joinville com os recursos de comunicação necessários para permitir a sua teleoperação.
Este estudo dirigido voltado para os aspectos de TeleManufatura foi de grande validade para o desenvolvimento do tema de doutoramento, pois foi possível estudar e consultar uma grande quantidade de referências sobre os aspectos de integração de CAD/CAPP/CAM e a teleoperação voltados para internet. O estudo teve como referência o sistema CyberCut da Universidade de Berkeley (http://cybercut.berkeley.edu), o sistema WebSpiff (http://www.webspiff.org), o sistema WebOxiCorte (http://weboxicorte.graco.unb.br) e outros sistemas desenvolvidos no mundo.
A disciplina permitiu que se adquirisse um profundo conhecimento dos aspectos de integração CAD/CAPP/CAM via Internet. Com a análise efetuada nos sistemas de TeleManufatura, Mode-lagem Cooperativa, Sistemas de Gerenciamento de Base de Dados Relacional, Sistemas Multi-Agentes, entre outros, apresentados como referência, foi possível conhecer as diversas arquiteturas, algoritmos, ferramentas computacionais e tecnologias da informação utilizados na implementação destes sistemas.
A primeira disciplina de estudo dirigido, cursada no terceiro período de 2001, tratou dos aspectos associados as atividades de Projeto e Planejamento de Processos Assistidos por computador. Nesta disciplina estudou-se as várias atividades a serem realizadas no planejamento do processo e os métodos, algoritmos e lógicas de decisão utilizados na resolução destes pro-blemas foram pesquisados e relacionados. A maioria destas abordagens são minuciosamente des-critas nas referências bibliográficas consultadas e disponibilizadas através do endereço: ftp://omega.enm.unb.br/pub/doutorado.
Estes dois estudos dirigidos servirão de base para a definição de uma metodologia e arquitetura a ser desenvolvida para tese de doutorado; e grande parte da pesquisa bibliográfica para o Exame de Qualificação já foi realizado. Todo o material em formato digital obtido na pesquisa bibliográfica está disponível na URL http://omega.enm.unb.br/pub.
Com o conhecimento adquirido em relação as diversas abordagens de metodologias e implementações realizadas no mundo para o desenvolvimento de sistemas integrados de Telemanufatura, ficou claro que a metodologia e sistema computacional a ser concebido, para integração CAD/CAPP/CAM orientado para fabricação de peças rotacionais utilizando o processo de torneamento, deve ser baseado em:
This document was generated using the LaTeX2HTML translator Version 99.2beta8 (1.43)
Copyright © 1993, 1994, 1995, 1996,
Nikos Drakos,
Computer Based Learning Unit, University of Leeds.
Copyright © 1997, 1998, 1999,
Ross Moore,
Mathematics Department, Macquarie University, Sydney.
The command line arguments were:
latex2html -no_subdir -split 0 -show_section_numbers /tmp/lyx_tmpdir25951gV4l5/lyx_tmpbuf2595gNoCbN/capp.tex
The translation was initiated by Alberto Álvares on 2002-05-29