Introduction
Blocks
Numbers
Words
Line Numbering Words
Axis Words
G "Preparatory" Words
M "Miscelaneous Words"
F, S, T, "Control" Words
Modal Codes
RS-274D is the recommended standard for numerically controlled machines developed by the Electronic Industry Association in the early 1960's. The RS-274D revision was approved in February, 1980. These standards provide a basis for the writing of numeric control programs.
There are a number of historical sidelights to this standard, many having to do with the original use of punched paper tape as the only data interchange medium. The 64-character EIA-244 paper tape standard is now (thankfully) obsolete, and ASCII character bit patterns are now the standard representation. This old tape standard had specific characters used for 'searching' for specific lines (program blocks) on the tape, 'rewinding' the tape, etc. Ocasionally this obsolete language is still used when referring to some cnc control tasks.
The full NIST Enhanced Machine Controller is nc programmed using a variant of the RS274D language to control motion and I/O. This variant is called RS276NGC because it was developed for the Next Generation Controller, a project of the National Center for Manufacturing Science. The version of RS274 used by EMC adheres closely to the publications of the NCMS wherever those publications produce an unambiguous set. In some cases reference to other implementations of RS274 had to be made by NIST.
The basic unit of the nc program is the 'block', which is seen in printed form as a 'line' of text. Each block can contain one or more 'words', which consist of a letter, describing a setting to be made, or a function to be performed, followed by a numeric field, supplying a value to that function. A permissible block of input is currently restricted to a maximum of 256 characters.
The following order is required for the construction of a block.
1. an optional block delete character, which is a slash / .The interpreter allows words starting with any letter except N (which denotes a line number and must be first) to occur in any order. Execution of the block will be the same regardless of the order.
2. an optional line number.
3. any number of segments, where a segment is a word or a comment.
4. an end of line character.
An example of a program block would be
/N0001 G0 X123.05This block is constructed using three words, N0001, G0, and X123.05. The meanings of each of these words is described in detail below. In essence, the n word numbers the line, the g0 word tells the machine to get to its destination as quickly as it can, and the final position of the x axis is to be 123.05. Since it is constructed with a preceeding slash, this block could be deleted during a run if optional block delete were activated.
There are some general considerations when writing nc code for the EMC:
There are a number of limitations about the number or types of words that can be strung together into a block. The interpreter uses the following rules:
For now it is enough to remember that a program block is more than the words that are written in it. Various words can be combined to specify multi-axis moves, or perform special functions. While a block of code has a specific order of execution, it must be considered to be a single command. All of the words within a block combine to produce a single set of actions which may be very different from the actions assigned to the same words were they placed in separate blocks. A simple example using axis words should illustrate this point.
n1 x6 - moves from the current x location to x6The final position of the first three blocks (n1-n3) and the (n10) block are the same. The first set of blocks might be executed in sequence to move the tool around an obstacle while the path of the tool for the combined block (n10) might run it into the part or the fixture.
n2 y3 - moves from current y location to y3 at x6
n3 z2 - moves from current z location to z2 at x6 and y3n10 x6 y3 z2 - moves on a single line from current x, y, z to x6 y3 z2
To make the specification of an allowable line of code precise, NIST defined it in a production language (Wirth Syntax Notation). These definitions appear as Table *** at the end of this chapter. In order that the definition in the appendix not be unwieldy, many constraints imposed by the interpreter are omitted from that appendix. The list of error messages elsewhere in the Handbook indicates all of the additional constraints.
Since every nc word is composed of a letter and a value. Before we begin a serious discussion of the meaning of nc programming words we need to consider the meaning of value within the interpreter. A real_value is some collection of characters that can be processed to come up with a number. A real_value may be an explicit number (such as 341 or -0.8807), a parameter value, an expression, or a unary operation value. In this chapter all examples will use explicit numbers. Expressions and unary operations are treated in the computation chapter. The use of parameter values or variables are a described in detail in the Using Variables chapter.
EMC uses the following rules regarding numbers. In these rules a digit is a single character between 0 and 9.
A number consists of :
Some additional rules about the meaning of numbers are that:
An nc program word is an acceptable letter followed by a real_value. Table 2 shows the current list of words that the EMC interpreter recognizes. The meanings of many of these words are listed in detail below. Some are included in and in the chapter on tool radius compensation and the chapter on canned cycles.
| D
F G H I J K L |
tool radius compensation number
feedrate general function (see below) tool length offset X-axis offset for arcs X offset in G87 canned cycle Y-axis offset for arcs and Y offset in G87 canned cycle K Z-axis offset for arcs and Z offset in G87 canned cycle L number of repetitions in canned cycles and key used with G10 |
M
N P Q
S
|
miscellaneous function (see below)
line number dwell time with G4 and canned cycles key used with G10 Q feed increment in G83 canned cycle R arc radius canned cycle plane S spindle speed T tool selection X-axis of machine Y-axis of machine Z-axis of machine |
A line number is the letter N followed by an integer (with no sign) between 0 and 99999. Line numbers are not checked except for to many digits. It is not necessary to number lines because they are not used by the interpreter. But they can be convenient when looking over a program. N word line numbers are reported in error messages when errors are caused by program problems.
Line numbers can be confusing because they are not the number that is displayed as being executed. Nor are they the number used to restart an nc program at a line other than the start. That number is the number of the current block in the program file with 0 being the first block.
We have already seen examples of axis words. An X word would be X10.001, which by itself indicates the X axis should move to a position of 10.001 user units, which would normally be inches or mm. Table one lists the common names for axis. Not all of these names can be used by all of the EMC interpreters. X, Y, and Z words will be accepted by the current (Jan, 2000) interpreter. NIST will soon release an expanded interpreter that will allow for three rotary axis A, B, C, as well.
| X - Primary Linear Axis
Y - Primary Linear Axis Z - Primary Linear Axis |
U - Secondary axis parallel to X
V - Secondary axis parallel to Y
W- Secondary axis parallel to Z |
A - Angular axis around X axis
B - Angular axis around Y axis
C - Angular axis around Z axis |
Some G words alter the state of the machine so that it changes from cutting straight lines to cutting arcs. Other G words cause the interpretation of numbers as millimeters rather than inches. While still others set or remove tool length or diameter offsets. Most of the G words tend to be related to motion or sets of motions. Table 4 lists the currently available g words.
| G0 rapid positioning
G1 linear interpolation G2 circular/helical interpolation (clockwise) G3 circular/helical interpolation (c-clockwise) G4 dwell G10 coordinate system origin setting G17 xy plane selection G18 xz plane selection G19 yz plane selection G20 inch system selection G21 millimeter system selection G40 cancel cutter diameter compensation G41 start cutter diameter compensation left G42 start cutter diameter compensation right G43 tool length offset (plus) G49 cancel tool length offset G53 motion in machine coordinate system G54 use preset work coordinate system 1 G55 use preset work coordinate system 2 G56 use preset work coordinate system 3 G57 use preset work coordinate system 4 |
G58 use preset work coordinate system 5
G59 use preset work coordinate system 6 G59.1 use preset work coordinate system 7 G59.2 use preset work coordinate system 8 G59.3 use preset work coordinate system 9 G80 cancel motion mode (includes canned) G81 drilling canned cycle G82 drilling with dwell canned cycle G83 chip-breaking drilling canned cycle G84 right hand tapping canned cycle G85 boring, no dwell, feed out canned cycle G86 boring, spindle stop, rapid out canned G87 back boring canned cycle G88 boring, spindle stop, manual out canned G89 boring, dwell, feed out canned cycle G90 absolute distance mode G91 incremental distance mode G92 offset coordinate systems G92.2 cancel offset coordinate systems G93 inverse time feed mode G94 feed per minute mode G98 initial level return in canned cycles |
Tool diameter compensation (g40, g41, g42) and tool length compensation (g43, g49) are covered in a separate page. Canned milling cycles (g80 - g89, g98) are covered in their own page. Coordinate systems and how to use them is also covered in a separate page. (g10, G53 - G59.3, G92, G92.2)
Basic Motion and Feedrate
G0 Rapid Positioning
Using a G0 in your code is equivilant to saying "go rapidly to point xxx yyyy". This code causes motion to occur at the maximum traverse rate.
Example:
N100 G0 X10.00 Y5.00
This line of code causes the spindle to rapid travel from wherever it is currently to coordinates X= 10", Y=5"
When more than one axis is programmed on the same line, they move simultaneously until each axis arrives at the programmed location. Note that the axes will arrive at the same time, since the ones that would arrive before the last axis gets to the end are slowed down. The overall time for the move is exactly the same as if they all went at their max speeds and the last axis to arrive stops the clock.
To set values for rapid travel in EMC, one would look for this line in the appropriate emc.ini file:
[AXIS_#] MAX_VELOCITY = (units/second)
The previous value for the rapid rate, [TRAJ] MAX_VELOCITY, is still used as the upper bound for the tool center point velocity. You can make this much larger than each of the individual axis values to ensure that the axes will move as fast as they can.
One thing to remember when doing rapid positioning, is to make sure that there are no obstacles in the way of the tool or spindle while making a move. G0 code can make spectacular crashes, if Z is not clear of clamps, vises, uncut parts, etc.....Try to raise the tool out of the way to a "safe" level before making a rapid.
I like to put a G0 Z2.0 (Z value depending on clamp height) towards the beginning of my code, before making any X or Y moves.
Example:
N100 G0 Z1.5 ----move spindle above obstacles
N110 G0 X2.0 Y1.5 ----rapid travel to first location
G1 Linear Interpolation
G1 causes the machine to travel in a straight line with the benefit of a programmed feed rate (using "F" and the desired feedrate). This is used for actual machining and contouring.
Example:
N120 Z0.1 F6.0 ----move the tool down to Z=0.1 at a rate of 6 inches/minute
N130 Z-.125 F3.0 ----move tool into the workpiece at 3 inches/minute
N140 X2.5 F8.0 ----move the table, so that the spindle travels to X=2.5
at a rate of 8 inches/minute
G2 Circular/Helical Interpolation (Clockwise)
G2 causes clockwise circular motion to be generated at a specified feed rate (F). The generated motion can be 2-dimensional, or 3-dimensional (helical). On a common 3-axis mill, one would normally encounter lots of arcs generated for the X,Y plane, with Z axis motion happening independently (2 axis moves in G17 plane). But, the machine is capable of making helical motion, just by mixing Z axis moves in with the circular interpolation.
When coding circular moves, you must specify where the machine must go and where the center of the arc is in either of two ways: By specifying the center of the arc with I and J words, or giving the radius as an R word.
I is the incremental distance from the X starting point to the X coordinate of the center of the arc. J is the incremental distance from the Y starting point to the Y coordinate of the center of the arc.
Examples:
G1 X0.0 Y1.0 F20.0 ----go to X1.0, Y0.0 at a feed rate of 20 inches/minute
G2 X1.0 Y0.0 I0.0 J-1.0 ----go in an arc from X0.0, Y1.0 to X1.0 Y0.0,
with the center of the arc at X0.0, Y0.0
G1 X0.0 Y1.0 F20.0 ----go to X1.0, Y0.0 at a feed rate of 20 inches/minute
G2 X1.0 Y0.0 R1.0 ----go in an arc from X0.0, Y1.0 to X1.0 Y0.0, with
a radius of R=1.0
G3 Circular/Helical Interpolation (Counterclockwise)
G3 is the counterclockwise sibling to G2.
G4 Dwell
Plane selection for coordinated motion
G17 xy plane selection
G18 xz plane selection
G19 yz plane selection
Short term change in programming units
G20 inch system selection
G21 millimeter system selection
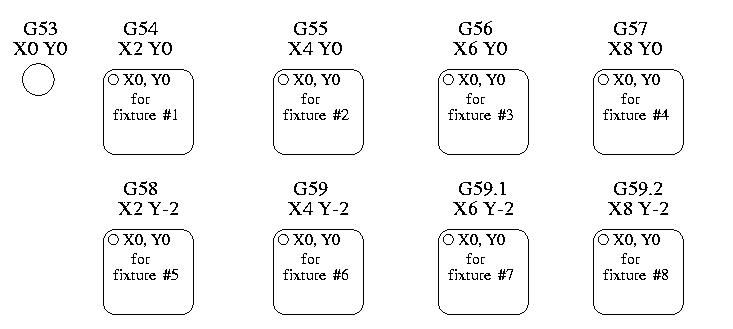
Fixture Offsets (G54-G59.3)
Fixture offset are used to make a part home that is different from the
absolute, machine coordinate system. This
allows the part programmer to set up home positions for multiple parts.
A typical operation that uses fixture offsets
would be to mill multiple copies of parts on "islands" in a piece,
similar to the figure below:
To use fixture offsets, the values of the desired home positions must be stored in the control, prior to running a program that uses them. Once there are values assigned, a call to G54, for instance, would add 2 to all X values in a program. A call to G58 would add 2 to X values and -2 to Y values in this example.
G53 is used to cancel out fixture offsets. So, calling G53 and then
G0 X0 Y0 would send the machine back to the actual coordinates of X=0,
Y=0.
| G53 motion in machine coordinate system |
| G54 use preset work coordinate system 1 |
| G55 use preset work coordinate system 2 |
| G56 use preset work coordinate system 3 |
| G57 use preset work coordinate system 4 |
| G58 use preset work coordinate system 5 |
| G59 use preset work coordinate system 6 |
| G59.1 use preset work coordinate system 7 |
| G59.2 use preset work coordinate system 8 |
| G59.3 use preset work coordinate system 9 |
Canned Cycles/Drill Subroutines (G80-G89)
Look here for a complete reference.
Distance Modes
G90 absolute distance mode
G91 incremental distance mode
Feedrate and feed modes
G93 inverse time feed mode
G94 feed per minute mode
M words are used to control many of the I/O functions of a machine. M words can start the spindle and turn on mist or flood coolant. M words also signal the end of a program or a stop withing a program. The complete list of M words available to the RS274NGC programmer is included in table 5.
| M0 program stop
M1 optional program stop M2 program end M3 turn spindle clockwise M4 turn spindle counterclockwise M5 stop spindle turning M6 tool change M7 mist coolant on |
M8 flood coolant on
M9 mist and flood coolant off M26 enable automatic b-axis clamping M27 disable automatic b-axis clamping M30 program end, pallet shuttle, and reset M48 enable speed and feed overrides M49 disable speed and feed overrides M60 pallet shuttle and program stop |
Many G codes and M codes cause the machine to change from one mode to another, and the mode stays active until some other command changes it implicitly or explicitly . Such commands are called "modal".
Modal codes are like a light switch. Flip it on and the lamp stays lit until someone turns it off. For example, the coolant commands are modal. If coolant is turned on, it stays on until it is explicitly turned off. The G codes for motion are also modal. If a G1 (straight move) command is given on one line, it will be executed again on the next line unless a command is given specifying a different motion (or some other command which implicitly cancels G1 is given).
"Non-modal" codes effect only the lines on which they occur. For example, G4 (dwell) is non-modal.
Modal commands are arranged in sets called "modal groups". Only one
member of a modal group may be in force at any given time. In general,
a modal group contains commands for which it is logically impossible for
two members to be in effect at the same time. Measurement in inches vs.
measure in millimeters are modal. A machine tool may be in many modes at
the same time, with one mode from each group being in effect. The modal
groups used in the interpreter are shown in Table 1.
| group 1 = {G0, G1, G2, G3, G80, G81, G82, G83, G84, G85,
G86, G87, G88, G89} - motion
group 2 = {G17, G18, G19} - plane selection group 3 = {G90, G91} - distance mode group 5 = {G93, G94} - spindle speed mode group 6 = {G20, G21} - units group 7 = {G40, G41, G42} - cutter diameter compensation group 8 = {G43, G49} - tool length offset group 10 = {G98, G99} - return mode in canned cycles group12 = {G54, G55, G56, G57, G58, G59, G59.1, G59.2, G59.3} coordinate system selection |
| group 2 = {M26, M27} - axis clamping
group 4 = {M0, M1, M2, M30, M60} - stopping group 6 = {M6} - tool change group 7 = {M3, M4, M5} - spindle turning group 8 = {M7, M8, M9} - coolant group 9 = {M48, M49} - feed and speed override bypass |
There is some question about the reasons why some codes are included in the modal group that surrounds them. But most of the modal groupings make sence in that only one state can be active at a time.
This page is a rather direct rip off of the relevant portion of the RS274NGC doccument from NIST. It is a work in progress and always will be a work in progress! This page is maintained by Dan Falck. Your comments and criticisms are welcome. Examples of real code with drawings or screen capture would be really nice here.
This page is part of the EMC Handbook and is covered by its GPLD copyright.